Guardian Robot Project


News
- June 19, 2026New! An article by Drs. Sato, Tang, and Shimokawa has been published in Sensors
- June 11, 2026New! The robots “aiai” exhibiting at "MoN Takanawa”
- May 7, 2026 An article by Drs. Sonogashira and Kawanishi has been published in IEEE Access
- May 7, 2026 Demonstration Experiment on Elevator Robots: Providing Information and Fostering Relationships Among Users
- April 22, 2026 An article by Mr. Nguyen, Drs. John and Kawanishi has been published in Pattern Recognition
- April 14, 2026 An article by Drs. John and Kawanishi has been published in Multimedia Tools and Applications
- March 31, 2026 Report on the RIKEN Symposium “Technology Development and Demonstration Research for Robots That Sense the Human Mind” Now Available
- March 19, 2026 An article by Dr. Hsu et al. has been published in Sensors
Events
-
1:00 pm - 5:40 pm , Thursday November 20, 2025 symposium Ended RIKEN Symposium
Technology Development and Demonstration Research for Robots That Sense the Human Heart Joint Research Results Presentation by GRP and Kyoto University The event report has been posted on March 31
Videos

Pamphlet


About GRP
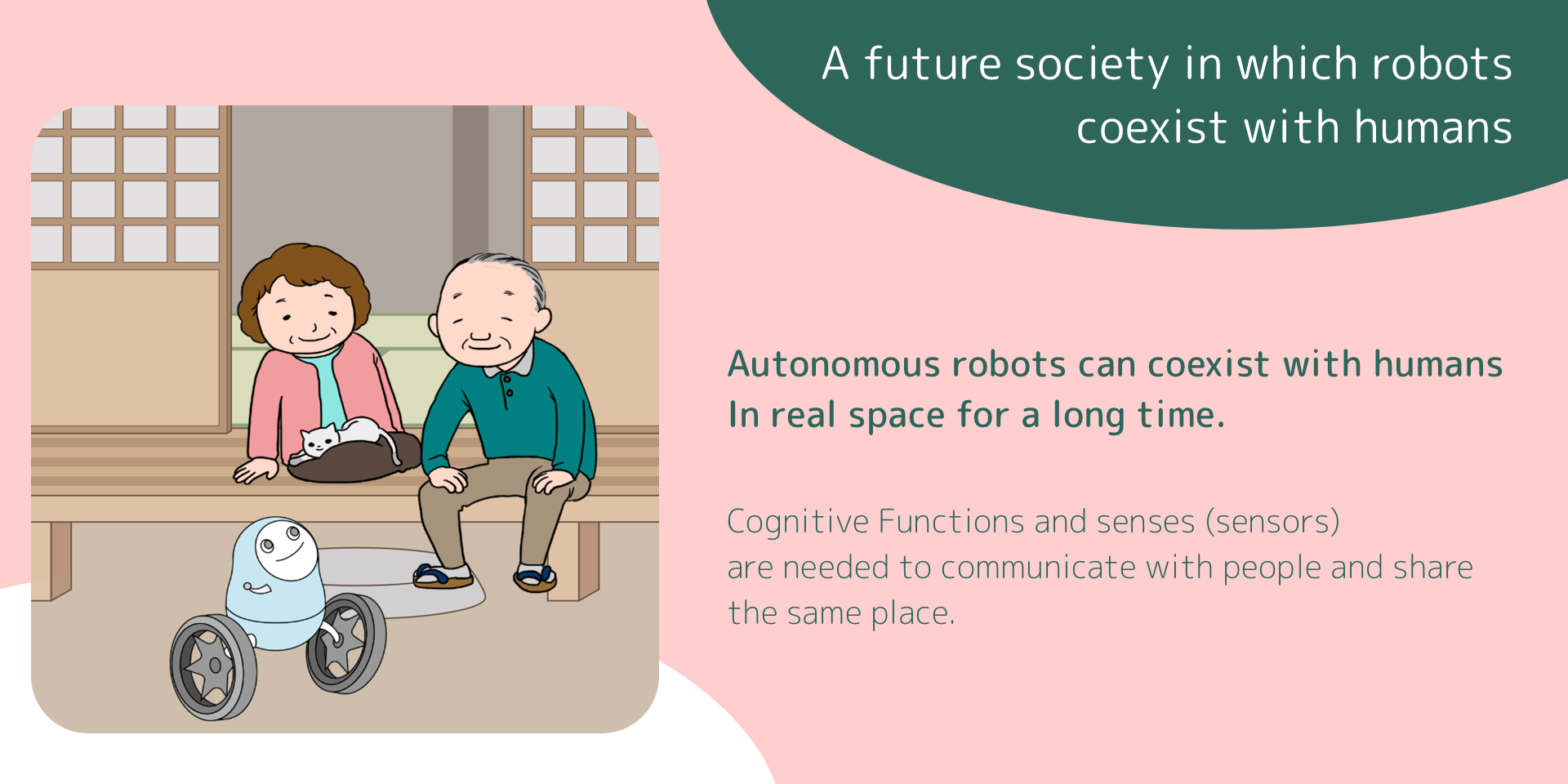
The Guardian Robot Project aims to develop an autonomous robot that can be close to people and make people feel the "heart". Once such a robot is realized, it will be accepted by people and will play an active role in every aspect of our homes and society!
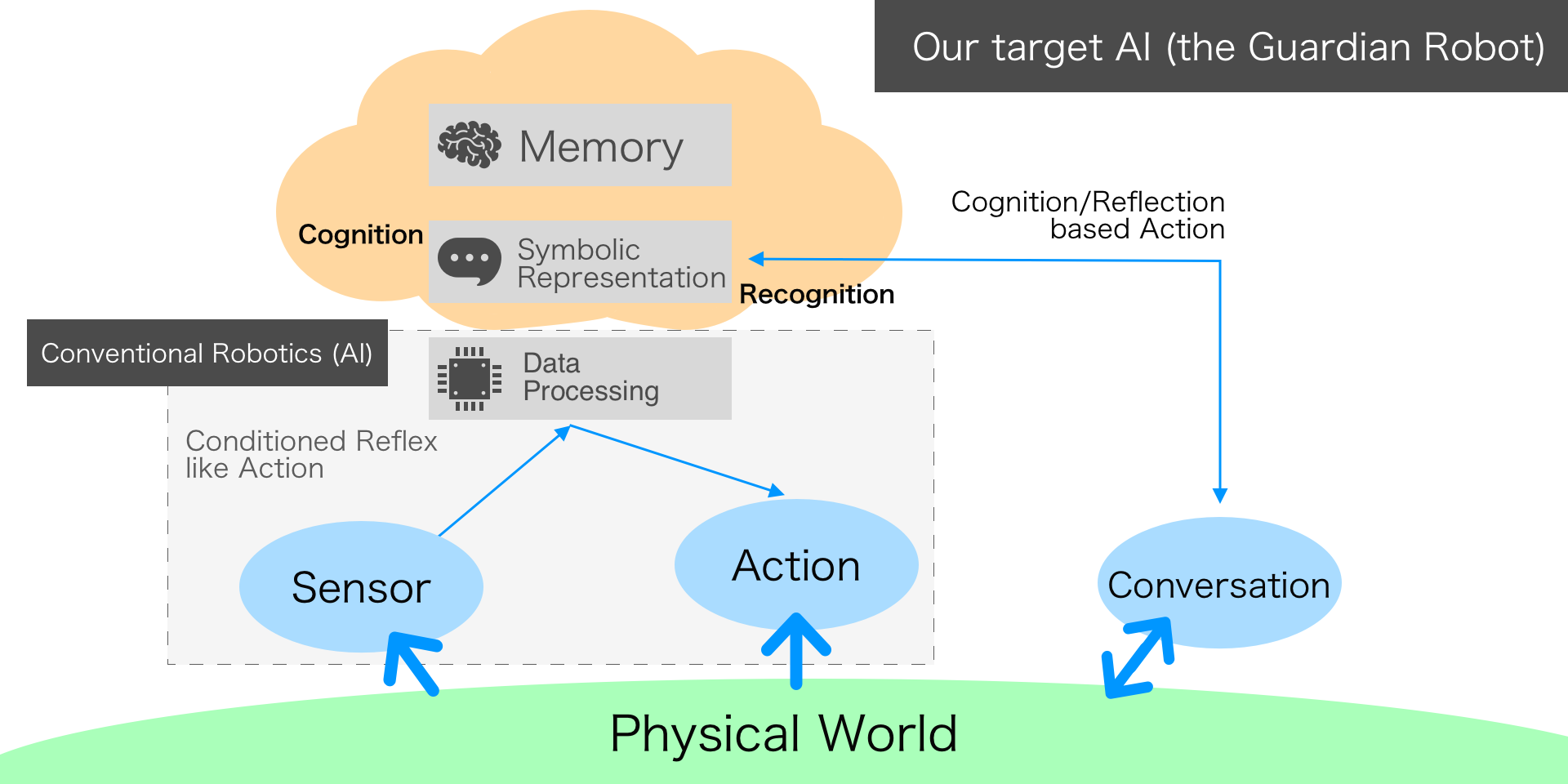
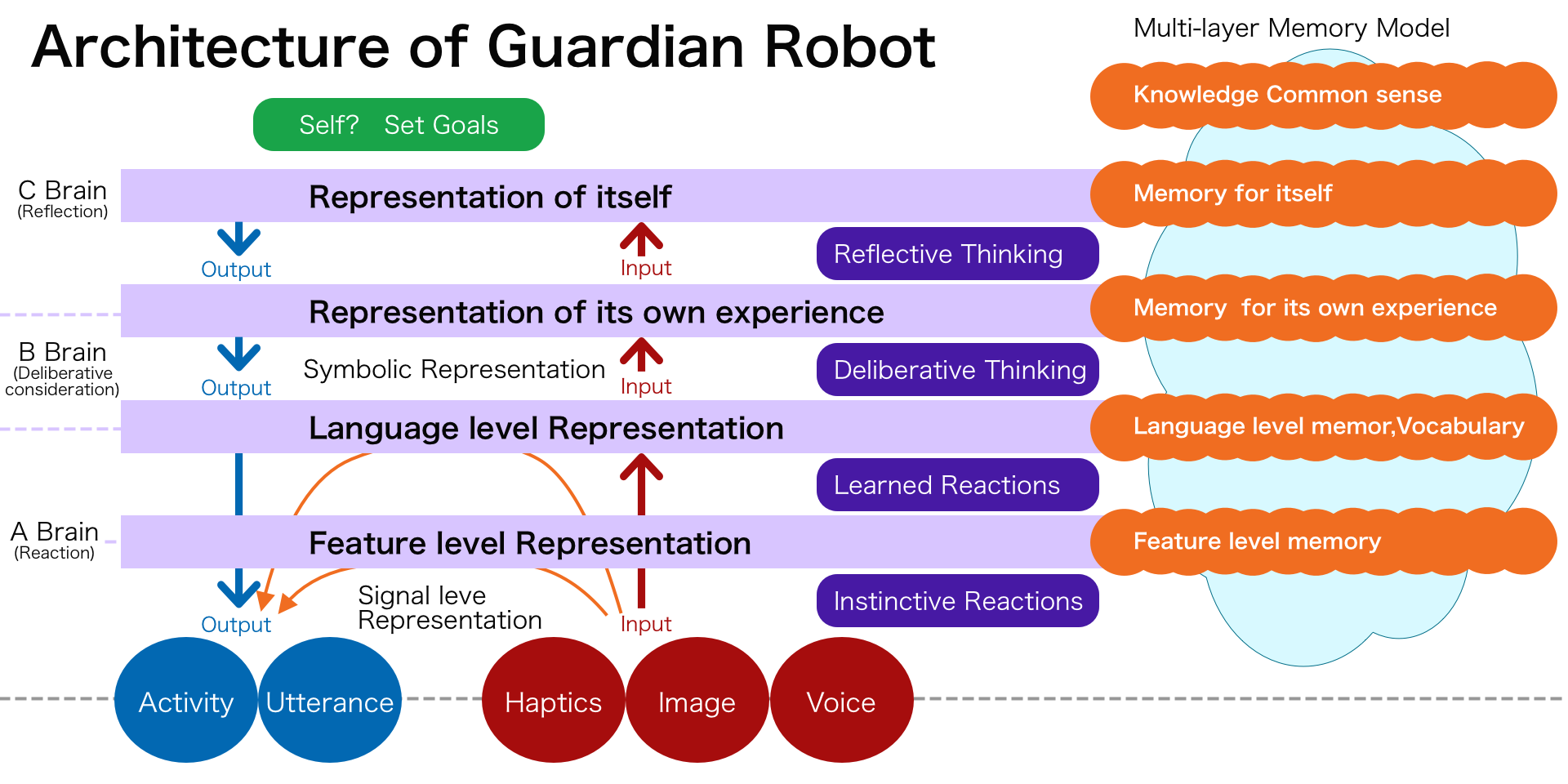
An autonomous function
What has been lacking in the development of robots up to now is an autonomous function that can gather information about its surroundings and act according to its own objectives.We are trying to make a breakthrough in robot development and artificial intelligence research by elucidating and constructing this function.
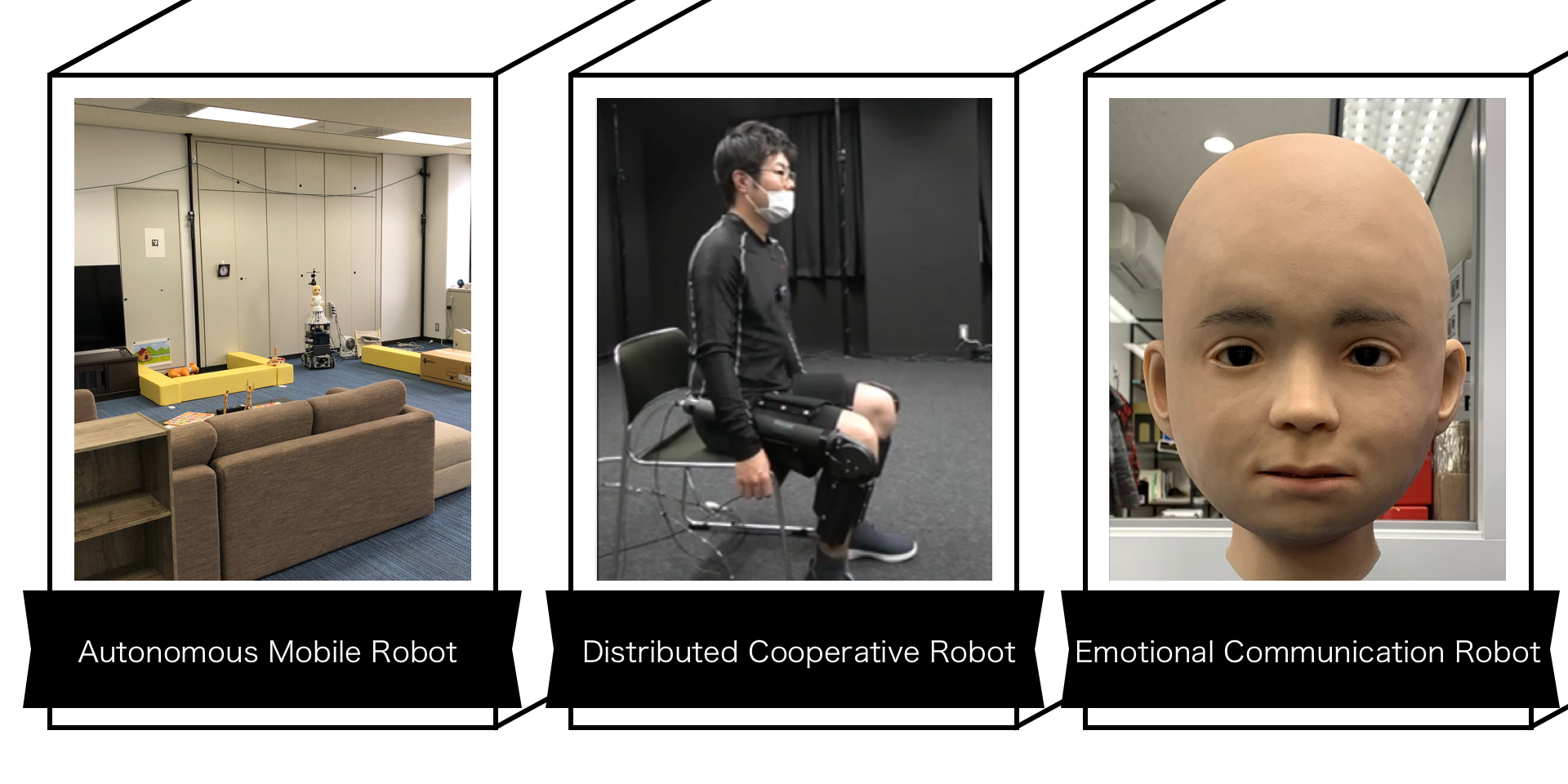
Robot form
There is more than one physical form of a robot. Depending on the purpose, there can be an exoskeleton wearing type whose main purpose is to support human movement, an autonomous driving type that can move around. There can also be a variety of "forms," such as an interactive type that can accurately carry out conversations with people. If the form is different, the control must be different. Therefore, a certain degree of control is left to each robot, and higher level control is done centrally. The novelty of our research lies in this method.
Six teams are working together

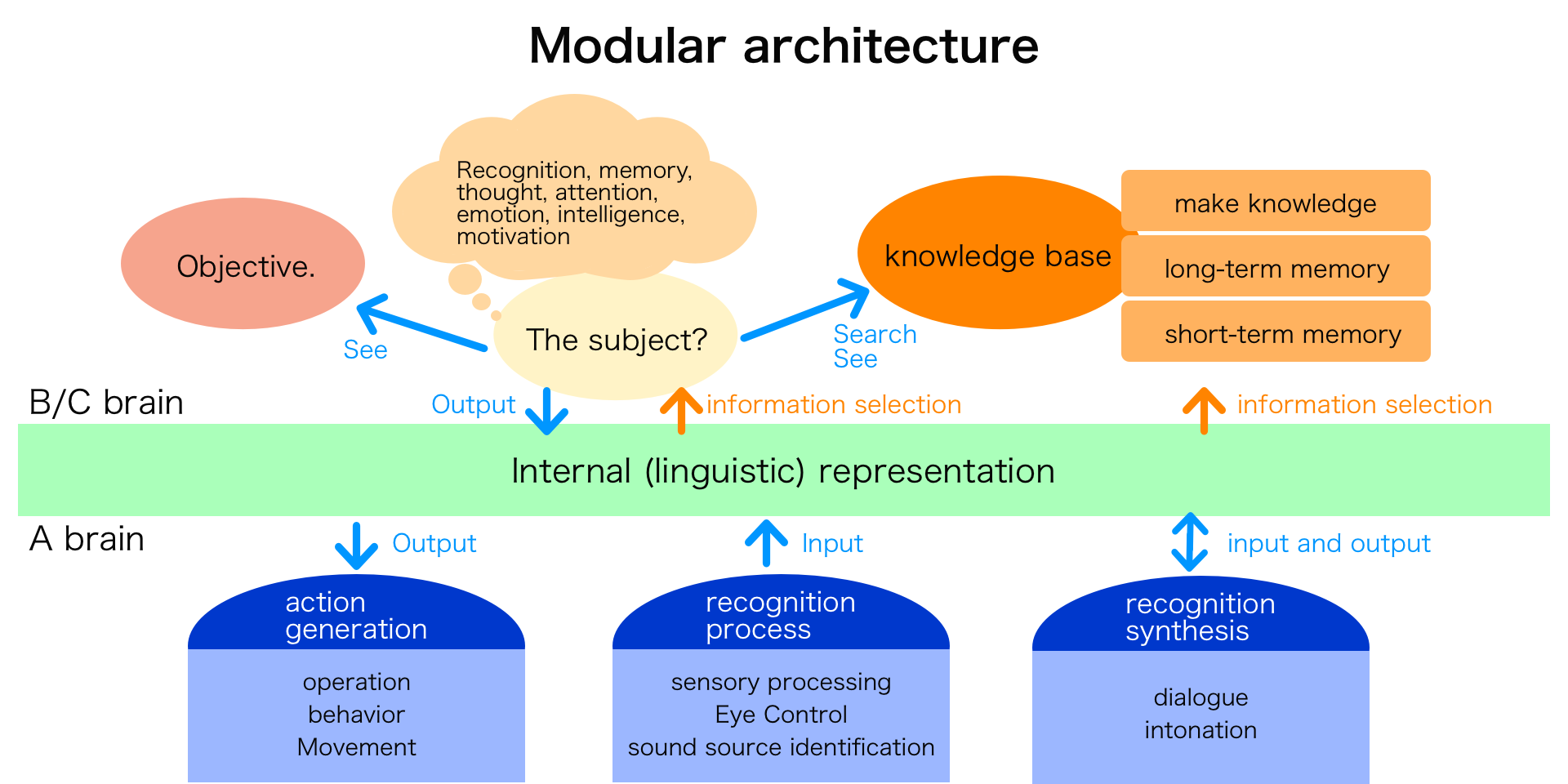
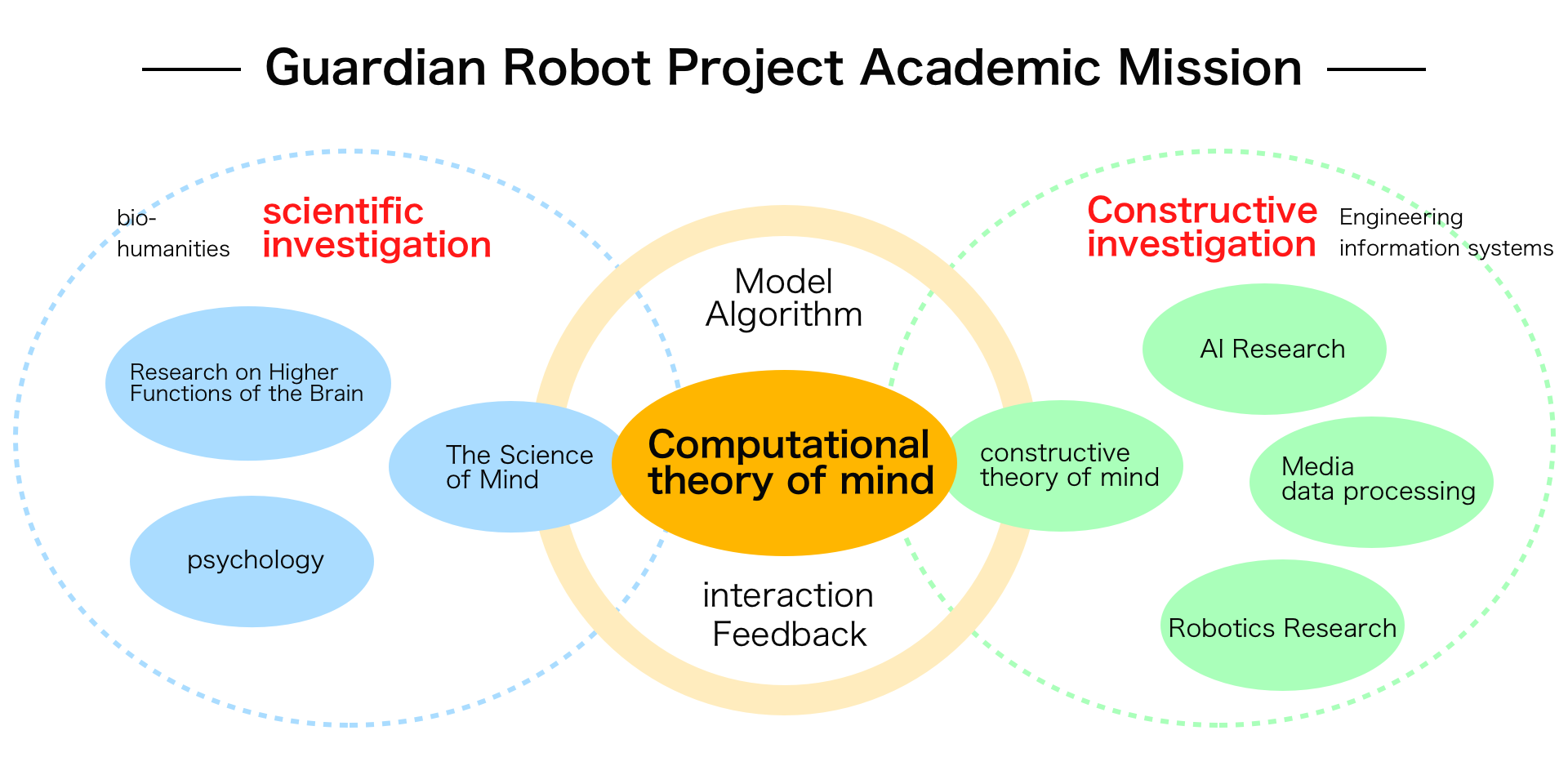
To realize autonomous functions, higher-order functions such as "initiative," "purpose," and "intention," as well as external recognition functions that support these functions are necessary. In the Guardian Robot Project, six teams are working together to elucidate and develop all these functions.
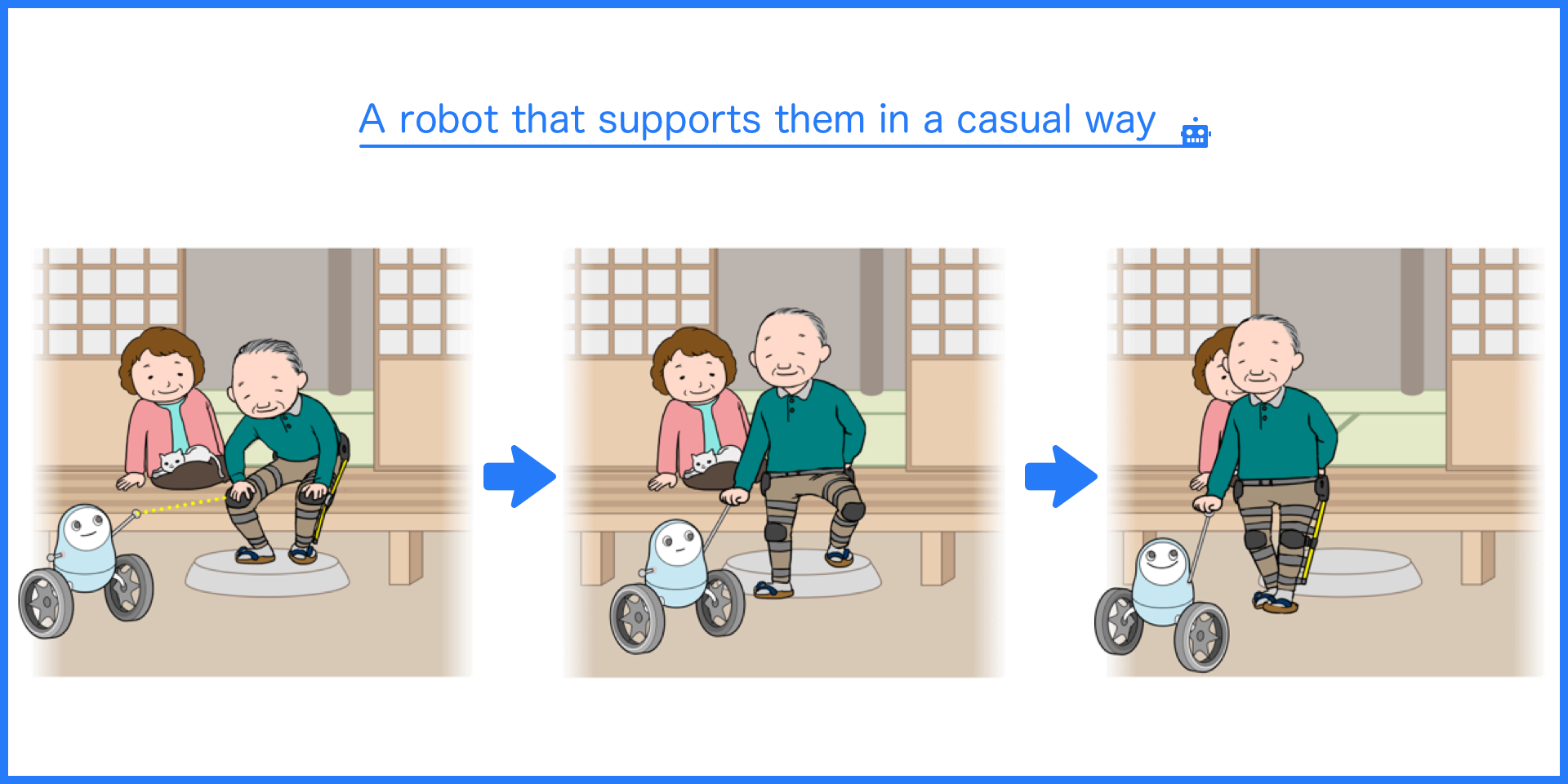
What is a guardian robot?
A robot that accompanies people and supports them in a casual way.
We named it 'Guardian' because it is like a human guardian who adapts to the individual.
