ガーディアンロボットプロジェクト


ニュース
- 2026年3月11日New! 佐藤チームディレクターらの研究が日経サイエンスで取り上げられました
- 2026年3月11日New! 井藤特別技術員、森本客員主管研究員、中村客員主管研究員、古川客員研究員らの論文がFrontiers in Bioengineering and Biotechnologyに採択されました
- 2026年2月27日New! 2026年度情報統合本部サマープログラム(けいはんな)の受け入れについて
- 2026年2月17日 Tang研修生・佐藤チームディレクターの論文がSensorsに採択されました
- 2026年1月29日 佐藤チームディレクター・下川テクニカルスタッフ・難波研究員・港チームディレクターの論文がInternational Journal of Social Roboticsに採択されました
- 2026年1月26日 難波研究員・佐藤チームディレクターらの論文がBritish Journal of Social Psychologyに採択されました
- 2026年1月26日 佐藤チームディレクター監訳の書籍が出版されました
- 2026年1月21日 「ITUジャーナル」に紹介記事が掲載されました

パンフレット

プロジェクトについて
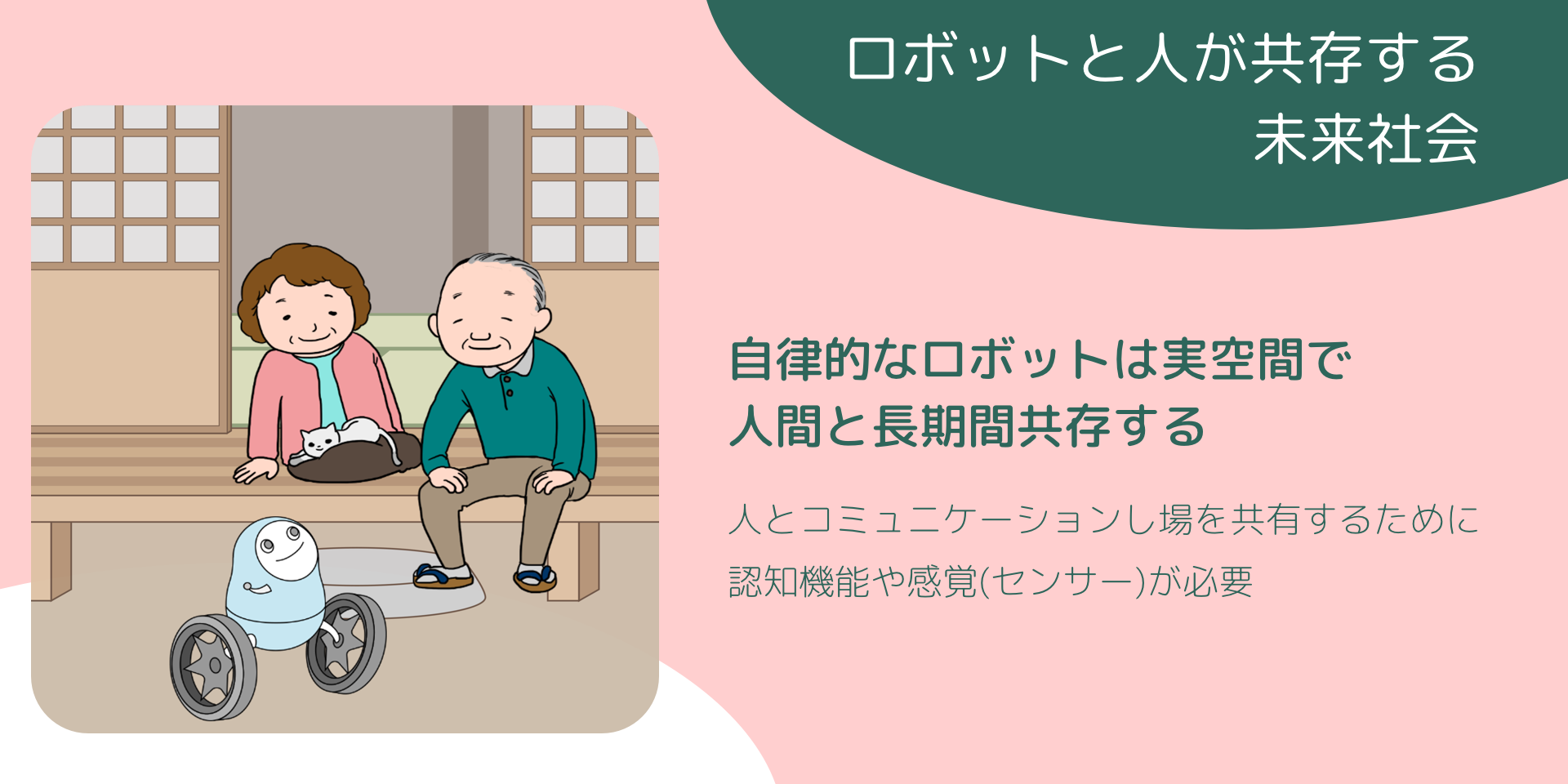
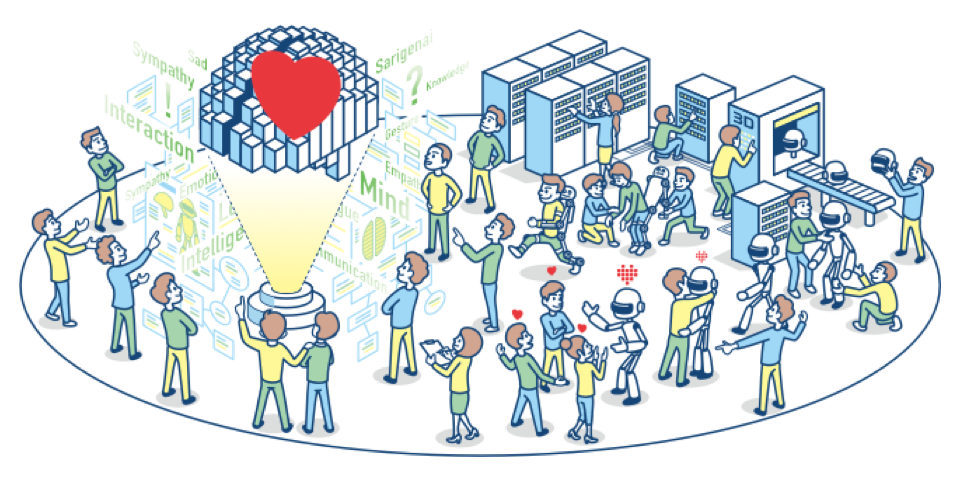
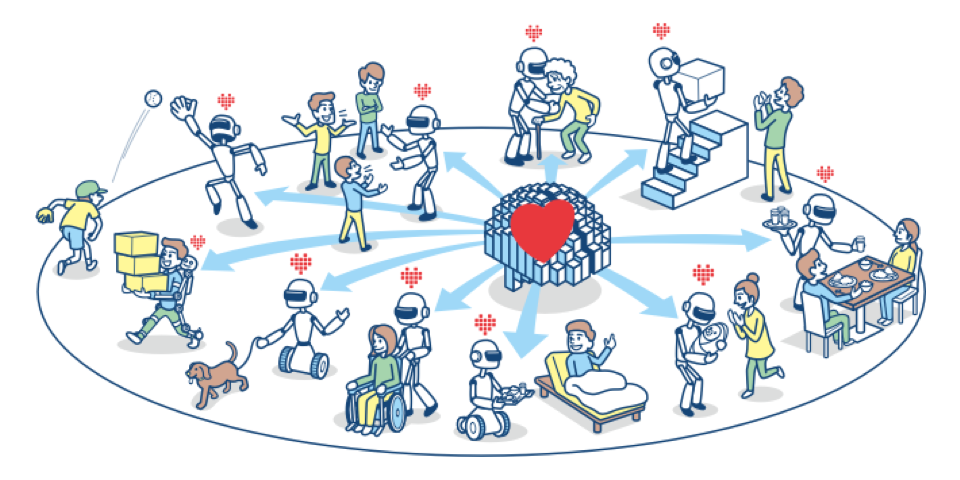
ガーディアンロボットプロジェクトは、人に寄り添い、人が「こころ」を感じる自律的なロボットの開発を目指しています。そのようなロボットが実現すれば、そのロボットは人に受け入れられ、家庭や社会のあらゆる場面で活躍するようになるでしょう!
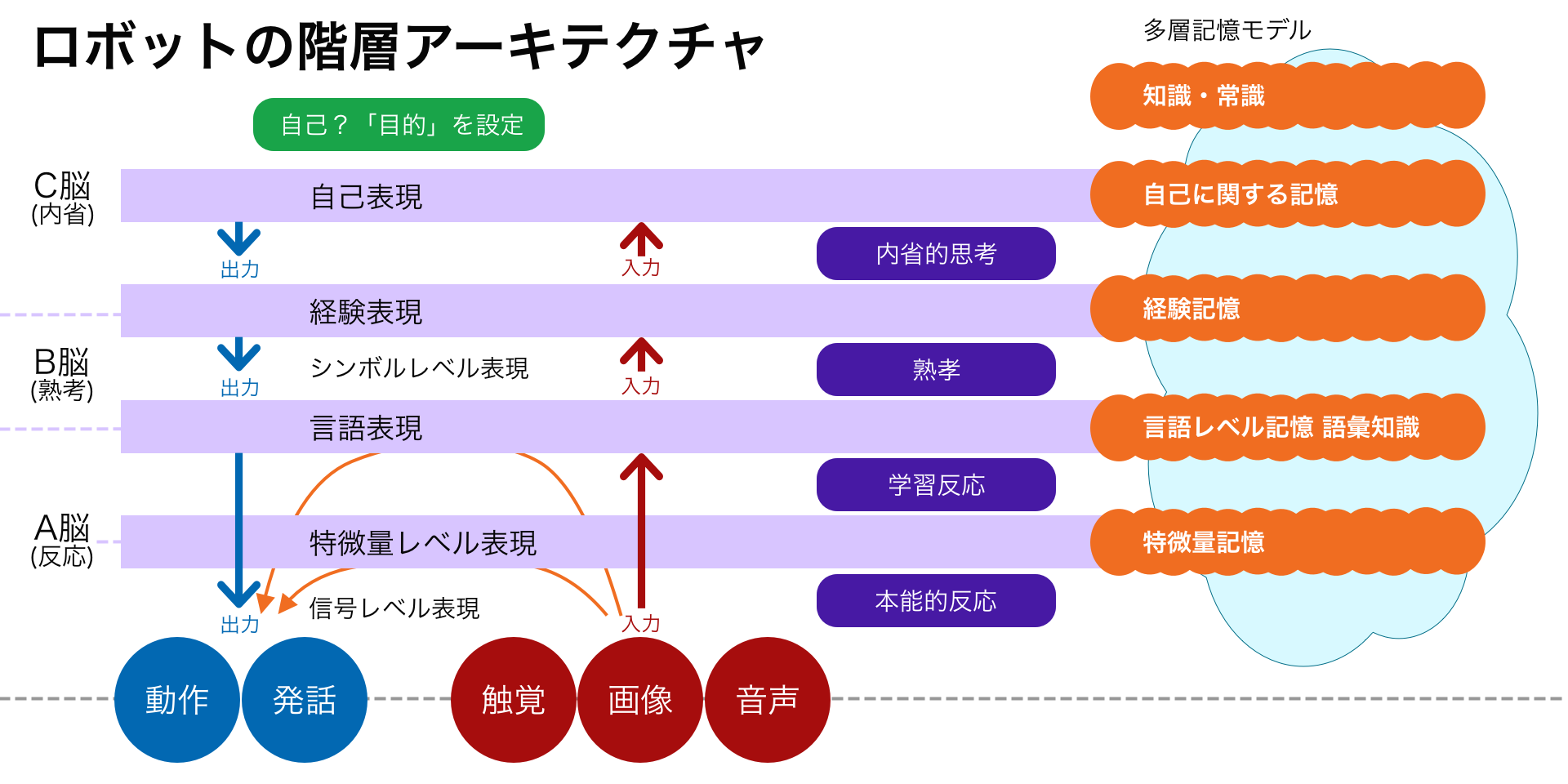
自律機能を創る
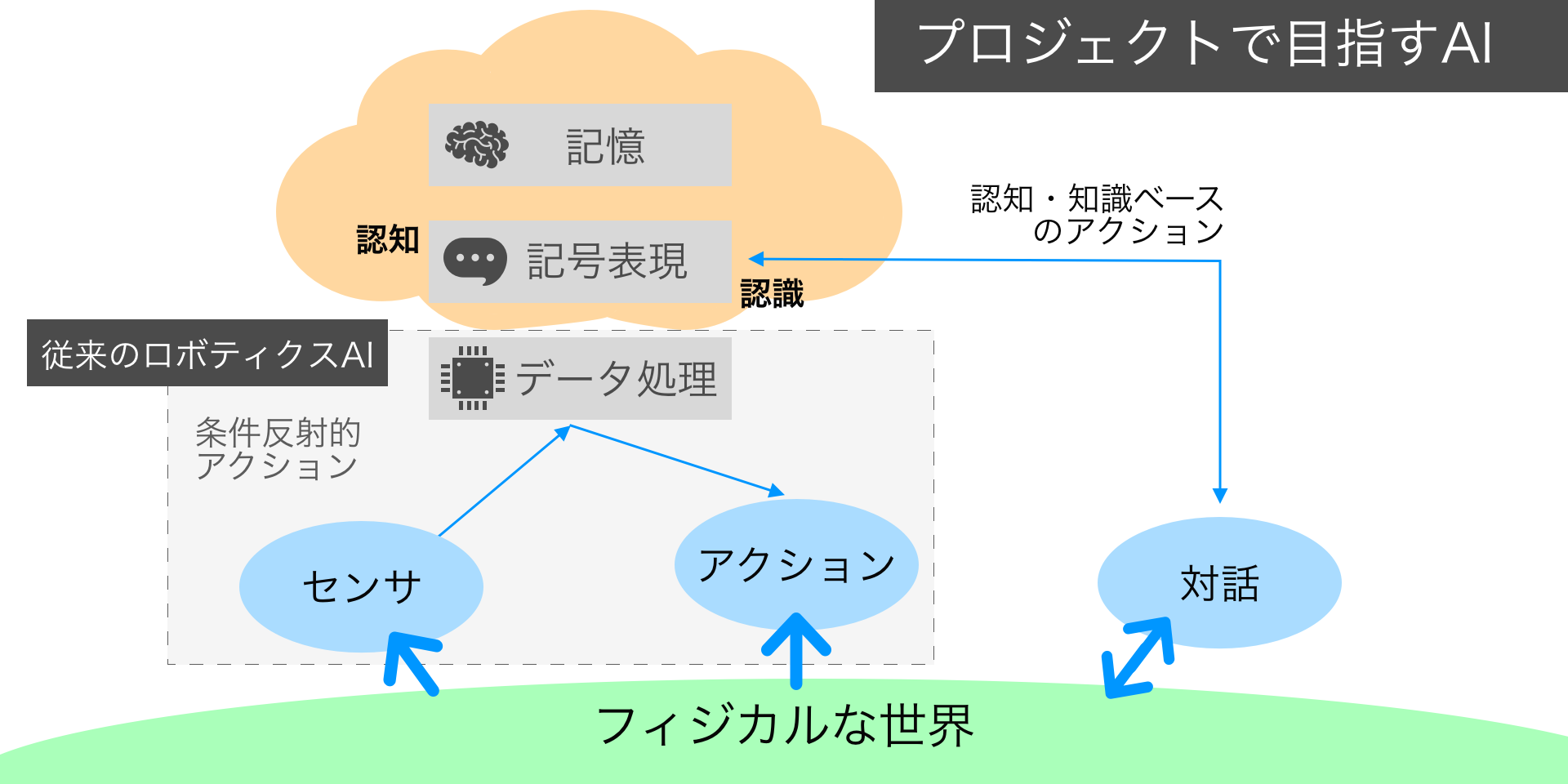
今までのロボット開発で一番欠けていたのは、自ら周囲の情報を収集し、自らの目的に沿って行動するための自律機能です。我々はその機能を解明し、実際に構成してみせることでロボット開発や人工知能研究のブレークスルーを起こそうとしています。
いろいろな形
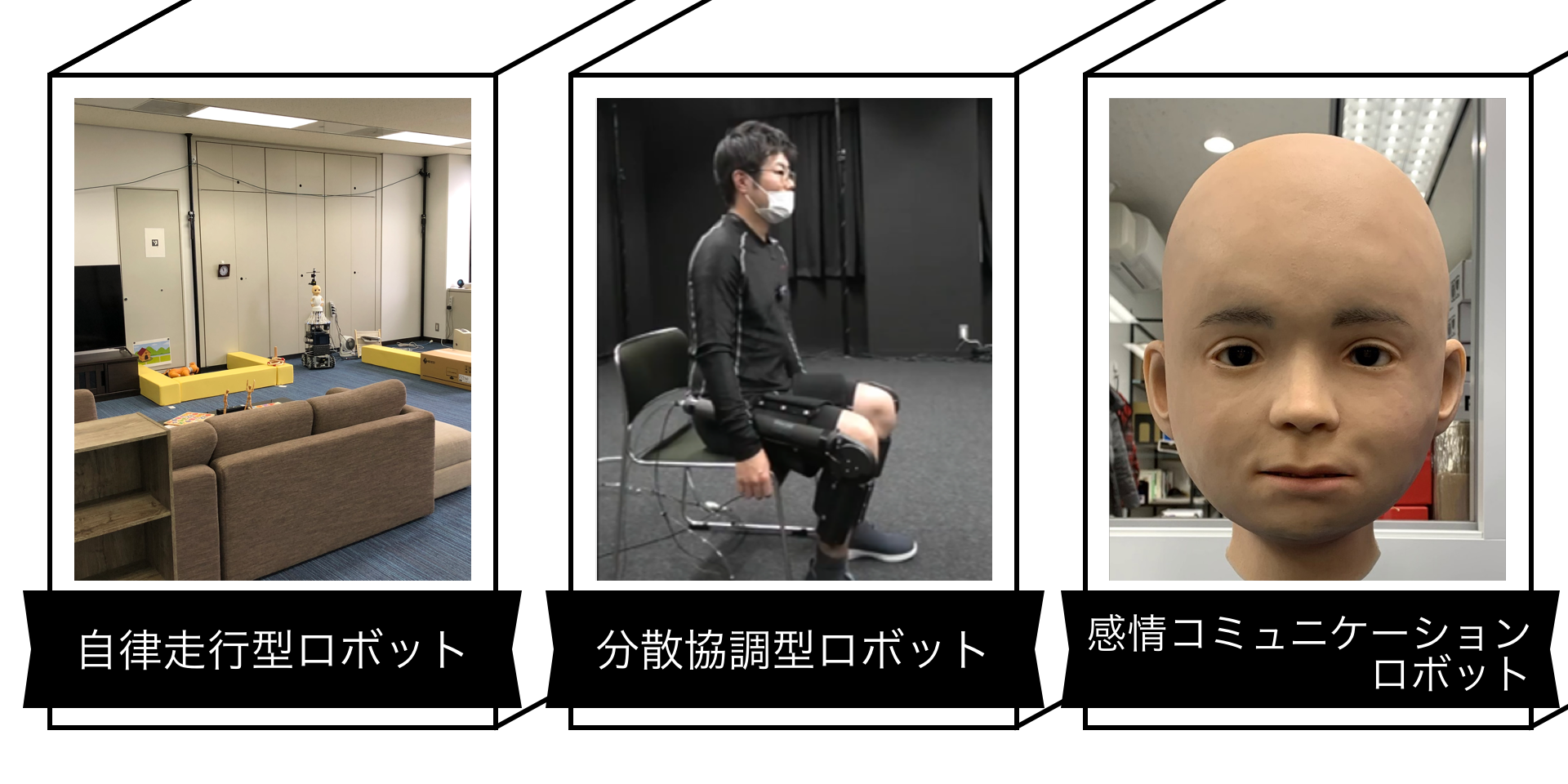
ロボットの物理的な形は1つとは限りません.目的に応じて人の動作サポートが主目的の外骨格装着型,あちこち動き回れる自律走行型.また,人との会話を的確にこなす対話型などいくつもの「形」が有り得ます.形が違えば制御も変えなければいけません.そこで,ある程度の制御は各々のロボットに任せ,より高次の制御を中央で行います.この方式に研究の新しさがあります.
6つのチーム1つのゴール

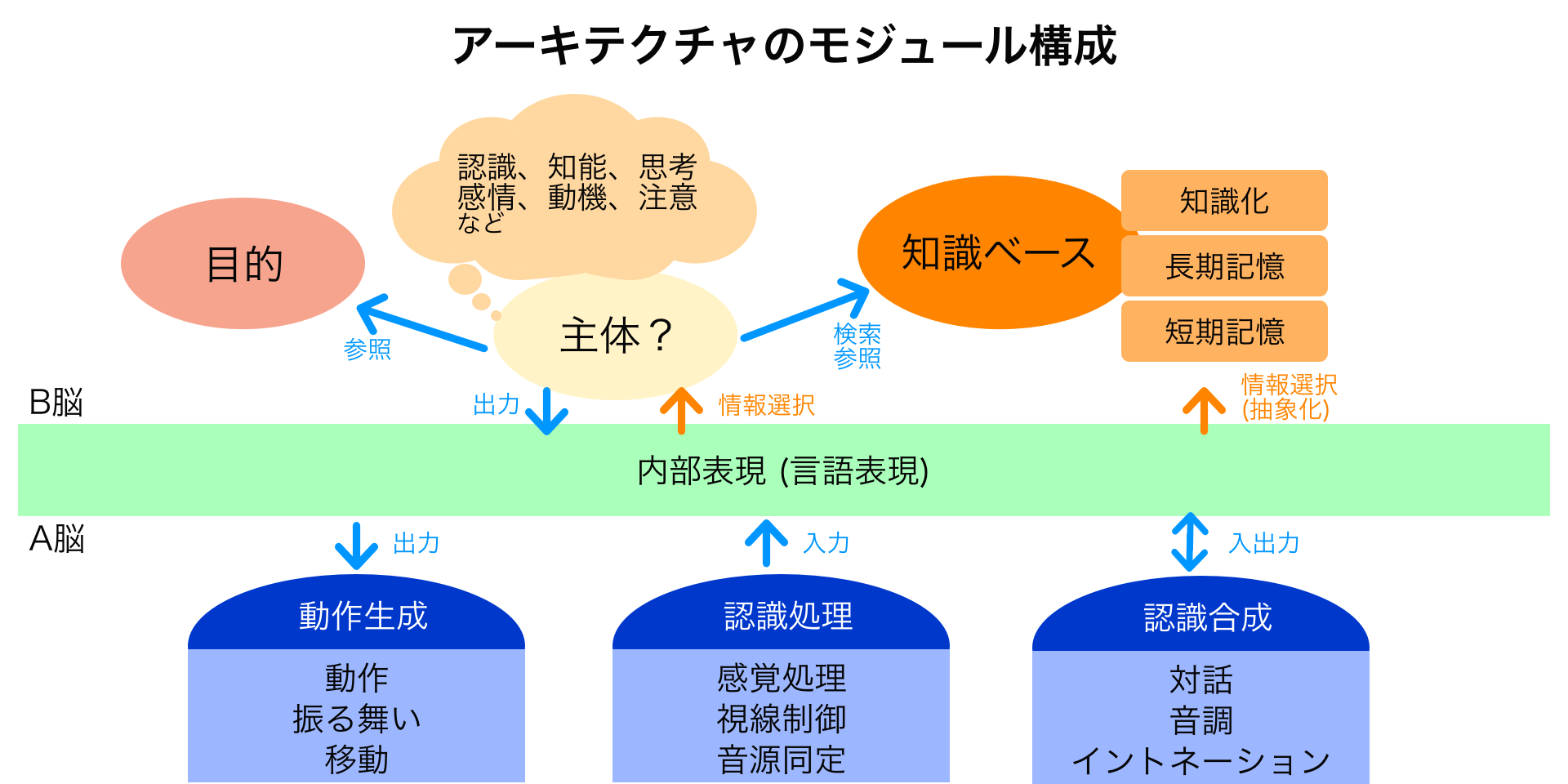
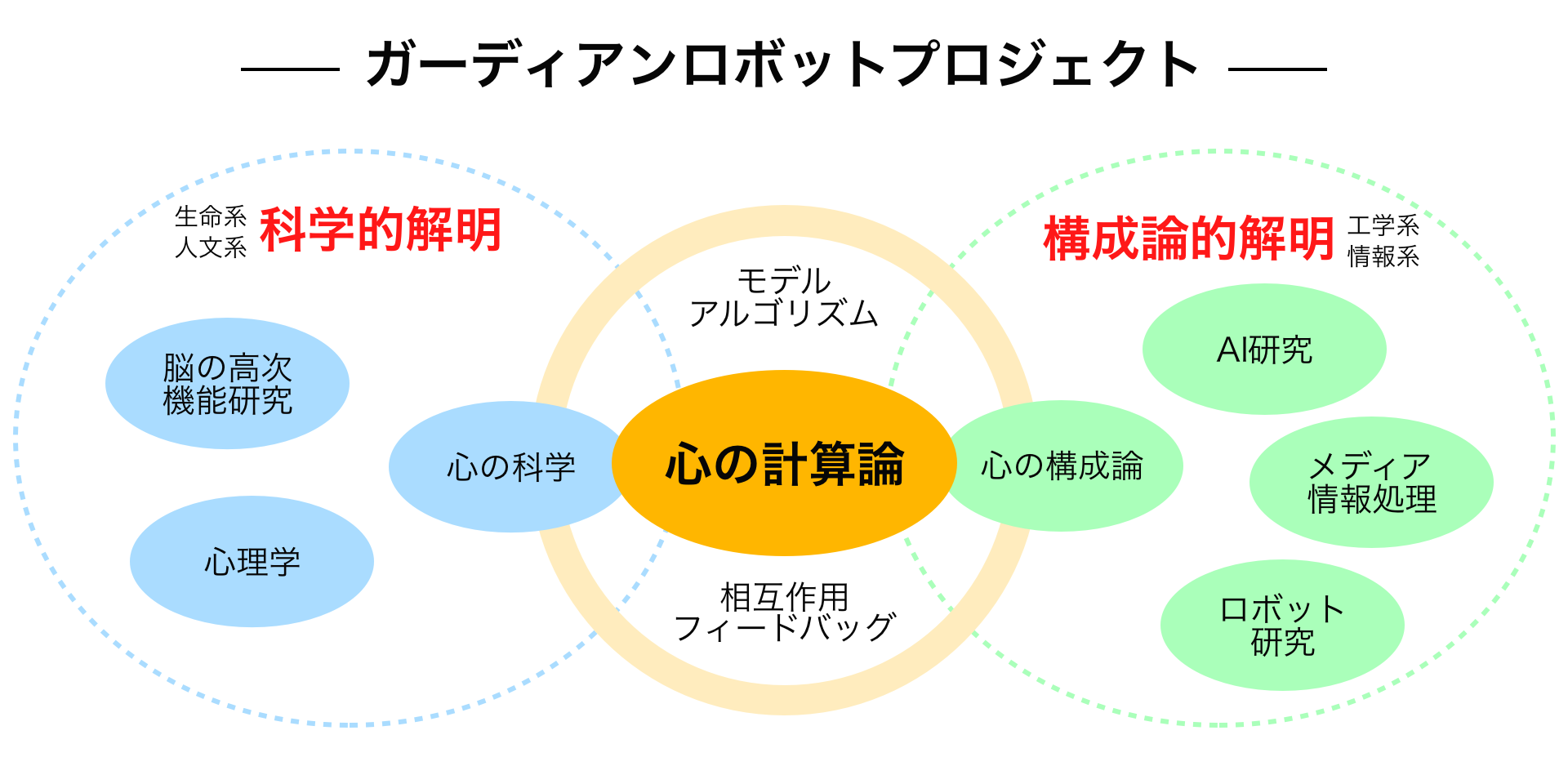
自律機能を実現するためには、「主体性」「目的」「意図」といった高次の機能やそれを支えるさまざまな要素となる外界の認識機能などが必要です。ガーディアンロボットプロジェクトでは6つのチームが一丸となってそれら多くの機能の解明と開発に取り組んでいます。
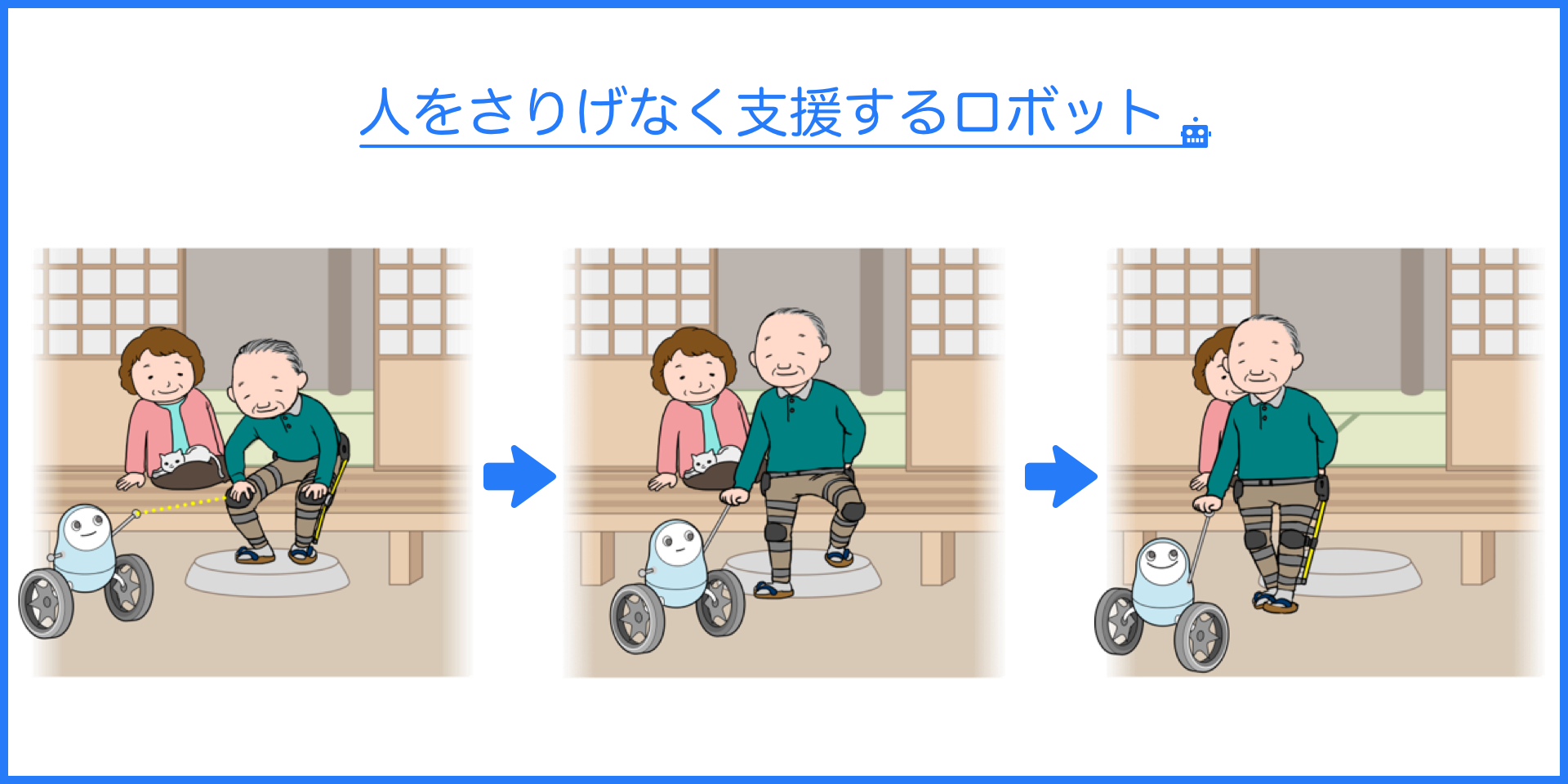
ガーディアンロボットとは
人に寄り添い、人をさりげなく支援するロボット。
個人に適応した黒子の様なロボットなので『ガーディアン』と命名しました。
