Man-Machine Collaboration
Research Team
The team ended in March 2026
The research content has been taken over by the Guardian Robot Project
The research content has been taken over by the Guardian Robot Project
Research Summary
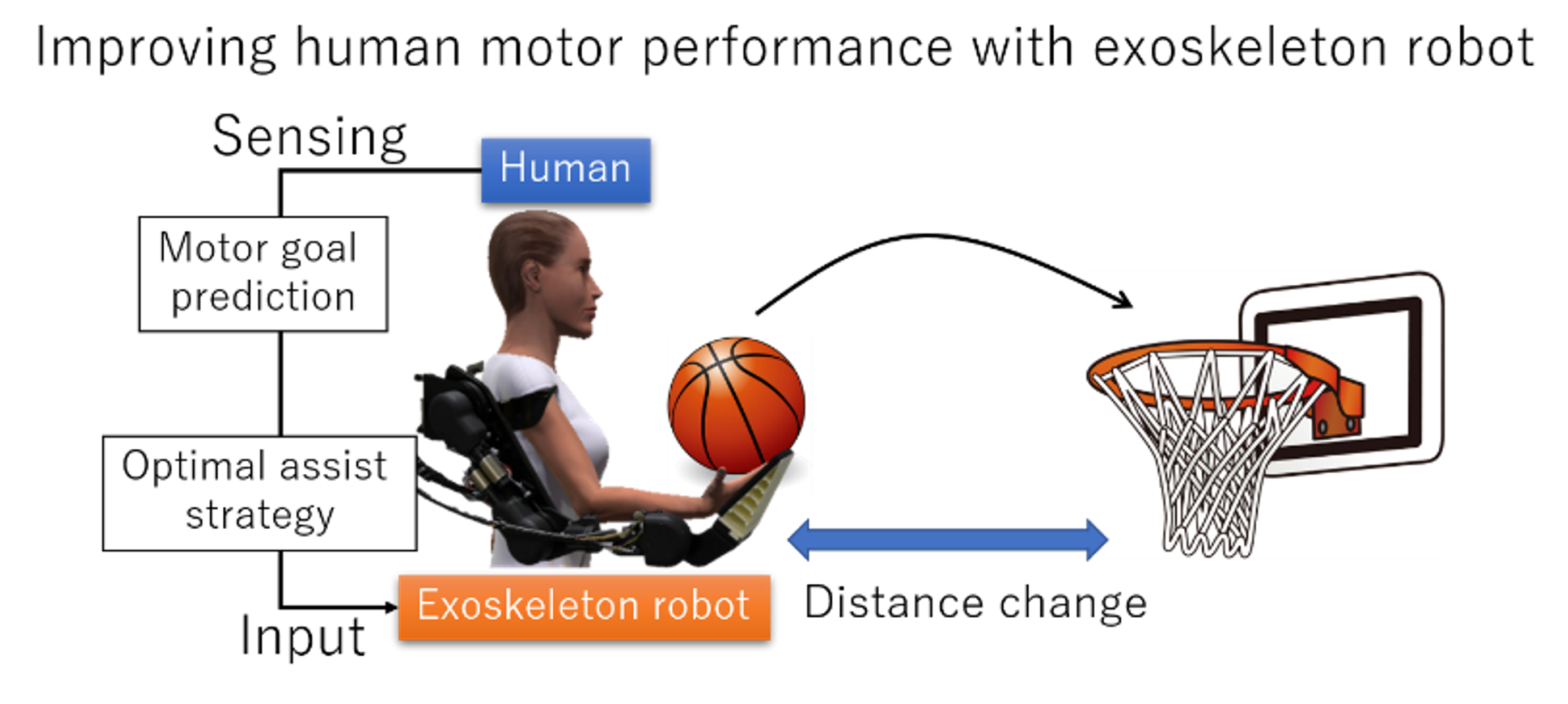
We aim to develop an invisible robot that detect human intentions and support them in the secretly without impairing their self-agency. Through this development, we will elucidate the principle of human-machine collaboration that can maximize human's ability and demonstrate it to actual robot system.
- Main Research Fields
- Assistive Robot
- Keywords
-
- Exoskeleton robot
- Motor control
- Motion estimation & prediction
- Machine learning
- Bio-signal analysis
- Research them
-
- Development of tailor-made adaptive motion support system
- Real-time motion prediction for assist in exquisite ways
- Human motion estimation based on bio-signal
Takashi Minato

History
- 2001
- Japan Science and Technology Agency (JST)
- 2002
- Osaka University
- 2006
- Japan Science and Technology Agency (JST)
- 2011
- Advanced Telecommunications Research Institute International (ATR)
- 2020
- RIKEN
Award
- 2016
- ATR Prize for excellent study
- 2020
- ATR Prize for excellent study
Members
- Jun Morimoto
- Senior Visiting Scientist
- Yuichi Nakamura
- Visiting Scientist
- Jun-ichiro Furukawa
- Visiting Scientist
- Takahide Ito
- Special technical staff
- Akihide Inano
- Senior Technical Staff
- Kai Ren
- Student Trainee
- Yuanda Yang
- Student Trainee
Former member
- Koki Akao
- Research Part-time Worker II(2025/02-2025/05)
- Koki Yamashita
- Research Part-time Worker II(2025/02-2025/05)
- Ilham Julian
- Student Trainee (2022/01-2022/03)
- Antonella Rech
- Student Trainee(2024/06-2024/10)
- Nag Aneek
- Research Intern (2022/08-2022/09)
- Elena Basei
- Research Intern (2022/10-2022/12 2023/7-2023/09)
Research results
- J. Furukawa, S. Okajima, Q. An, Y. Nakamura and J. Morimoto, "Selective Assist Strategy by Using Lightweight Carbon Frame Exoskeleton Robot," in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3890-3897, April 2022, doi: 10.1109/LRA.2022.3148799.
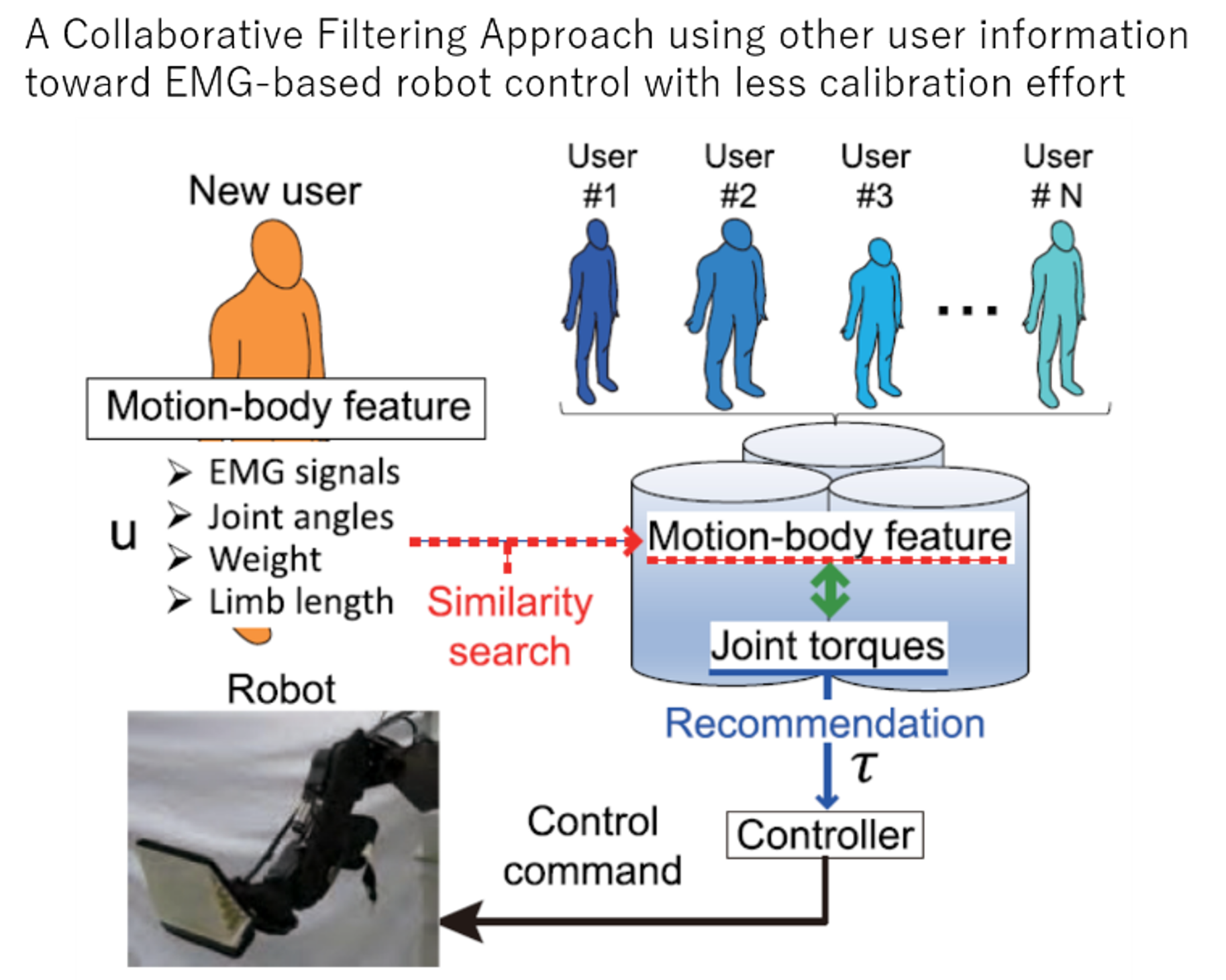
- J. Furukawa, S. Chiyohara, T. Teramae, A. Takai and J. Morimoto, “A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control,” in IEEE Transactions on Human-Machine Systems, vol. 51, no. 5, pp. 514-523, Oct. 2021, doi: 10.1109/THMS.2021.3098115.
- J. Furukawa, J. Morimoto, “Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User’s Motor Goal”, IEEE Robotics and Automation Letters, vol. 6, No. 2, pp. 1051-1058, 2021
- T. Teramae, T. Matsubara, T. Noda, J. Morimoto, “Quaternion-Based Trajectory Optimization of Human Postures for Inducing Target Muscle Activation Patterns”, IEEE Robotics and Automation Letters, Vol. 5, No. 4, pp. 6607-6614, 2020. (Joint Research with ATR)
Selected Publications
-
Jun-ichiro Furukawa, Jun Morimoto
"Transformer-based multitask assist control from first-person view image and user’s kinematic information for exoskeleton robots"
npj robotics, vol. 3, no. 13, 2025 -
Shinya Chiyohara, Jun-ichiro Furukawa, Tomoyuki Noda, Jun Morimoto, Hiroshi Imamizu.:
"Proprioceptive short-term memory in passive motor learning",
Scientific Reports, 13, Article number; 20826, 2023(ATRとの共同研究) -
Asuka Takai, Tatsuya Teramae, Tomoyuki Noda, Koji Ishihara, Jun-ichiro Furukawa, Hiroaki Fujimoto, Megumi Hatakenaka, Nobukazu Fujita, Akihiro Jino, Yuichi Hiramatsu, Ichiro Miyai, Jun Morimoto.:
"Development of split-force-controlled body weight support (SF-BWS) robot for gait rehabilitation",
Frontiers in Human Neuroscience. 17:1197380, 2023(ATRとの共同研究) -
Jun-ichiro Furukawa, Shotaro Okajima, Qi An, Yuichi Nakamura, Jun Morimoto.:
"Selective Assist Strategy by Using Lightweight Carbon Frame Exoskeleton Robot"
IEEE Robotics and Automation Letters, Vol. 7, no. 2, pp. 3890-3897, 2022 -
Jun-ichiro Furukawa, Shinya Chiyohara, Tatsuya Teramae, Asuka Takai, Jun Morimoto.:
"A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control"
IEEE Transactions on Human-Machine Systems, Vol. 51, no. 5, pp. 514-523, 2021 -
Jun-ichiro Furukawa, Jun Morimoto.:
"Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User's Motor Goal"
IEEE Robotics and Automation Letters, Vol. 6, no. 2, pp. 1051-1058, 2021 -
Tatsuya Teramae, Takamitsu Matsubara, Tomoyuki Noda, Jun Morimoto.:
"Quaternion-Based Trajectory Optimization of Human Postures for Inducing Target Muscle Activation Patterns"
IEEE Robotics and Automation Letters, Vol. 5, Issue: 4, pp. 6607-6614, 2020 -
Shinya Chiyohara, Jun-ichiro Furukawa, Tomoyuki Noda, Jun Morimoto and Hiroshi Imamizu.:
"Passive Training with Upper Extremity Exoskeleton Robot Affects Proprioceptive Acuity and Performance of Motor Learning"
Scientific Reports, 10, Article number; 11820, 2020 -
Masashi Hamaya, Takamitsu Matsubara, Tatsuya Teramae, Tomoyuki Noda, and Jun Morimoto.:
"Design of Physical User-Robot Interactions for Model Identification of Soft Actuators on Exoskeleton Robots"
International Journal of Robotics Research, first published online: June 6, 2019 -
Barkan Ugurlu, Paolo Formi, Corinne Doppmann, Emre Sariyildiz, and Jun Morimoto.:
"Stable Control of Force, Position, and Stiffness for Robot Joints Powered via Pneumatic Muscles"
IEEE Transactions on Industrial Informatics, Vol. 15, Issue 12, pp. 6270-6279 -
Tadej Petric, Luka Peternel, Jun Morimoto, and Jan Babic.:
"Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability
Frontiers in Neurorobotics, fnbot.2019.00030, 2019 -
Tatsuya Teramae, Koji Ishihara, Jan Babic, Jun Morimoto, and Erhan Oztop.:
"Human-in-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots"
Frontiers in Neurorobotics, fnbot.2018.00071 -
Tatsuya Teramae, Tomoyuki Noda, and Jun Morimoto.:
"EMG-Based Model Predictive Control for Physical Human-Robot Interaction: Application for Assist-As-Needed Control"
IEEE Robotics and Automation Letters, Vol. 3, issue 1, pp.210-217, 2018 -
Masashi Hamaya, Takamitsu Matsubara, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"Learning assistive strategies for exoskeleton robots from user-robot physical interaction"
Pattern Recognition Letters, Vol. 99, pp. 67-76, 2017 -
Jun-ichiro Furukawa, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"Human movement modeling to detect bio-signal sensor failures for myoelectric assistive robot control"
IEEE Transactions on Robotics, Vol. 33, Issue 4, pp. 846-857, 2017 -
Jun-ichiro Furukawa, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"An EMG-Driven Weight Support System with Pneumatic Artificial Muscles"
IEEE Systems Journal, Vol. 10, No. 3, pp. 1026-1034, 2016
Links
Man-Machine Collaboration Research Team(RIKEN)
Contact Information
takashi.minato [at] riken.jp