Man-Machine Collaboration
Research Team
Research Summary
We aim to develop an invisible robot that detect human intentions and support them in the secretly without impairing their self-agency. Through this development, we will elucidate the principle of human-machine collaboration that can maximize human's ability and demonstrate it to actual robot system.
- Main Research Fields
- Assistive Robot
- Keywords
-
- Exoskeleton robot
- Motor control
- Motion estimation & prediction
- Machine learning
- Bio-signal analysis
- Research them
-
- Development of tailor-made adaptive motion support system
- Real-time motion prediction for assist in exquisite ways
- Human motion estimation based on bio-signal
Takashi Minato

History
- 2001
- Japan Science and Technology Agency (JST)
- 2002
- Osaka University
- 2006
- Japan Science and Technology Agency (JST)
- 2011
- Advanced Telecommunications Research Institute International (ATR)
- 2020
- RIKEN
Award
- 2016
- ATR Prize for excellent study
- 2020
- ATR Prize for excellent study
Members
- Jun Morimoto
- Senior Visiting Scientist
- Yuichi Nakamura
- Visiting Scientist
- Jun-ichiro Furukawa
- Visiting Scientist
- Takahide Ito
- Special technical staff
- Akihide Inano
- Senior Technical Staff
- Kai Ren
- Student Trainee
- Yuanda Yang
- Student Trainee
Former member
- Koki Akao
- Research Part-time Worker II(2025/02-2025/05)
- Koki Yamashita
- Research Part-time Worker II(2025/02-2025/05)
- Ilham Julian
- Student Trainee (2022/01-2022/03)
- Antonella Rech
- Student Trainee(2024/06-2024/10)
- Nag Aneek
- Research Intern (2022/08-2022/09)
- Elena Basei
- Research Intern (2022/10-2022/12 2023/7-2023/09)
Research results
- J. Furukawa, S. Okajima, Q. An, Y. Nakamura and J. Morimoto, "Selective Assist Strategy by Using Lightweight Carbon Frame Exoskeleton Robot," in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3890-3897, April 2022, doi: 10.1109/LRA.2022.3148799.
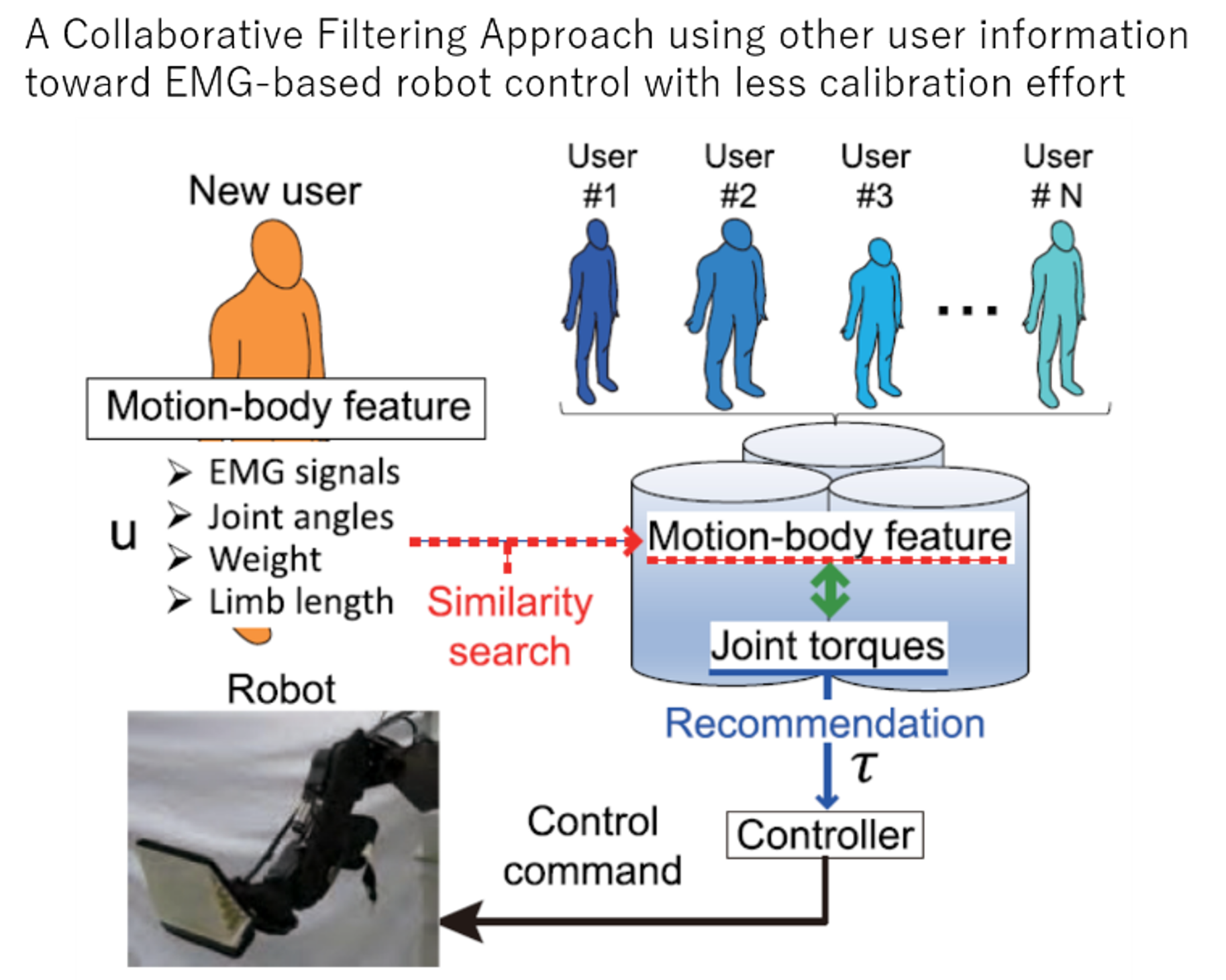
- J. Furukawa, S. Chiyohara, T. Teramae, A. Takai and J. Morimoto, “A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control,” in IEEE Transactions on Human-Machine Systems, vol. 51, no. 5, pp. 514-523, Oct. 2021, doi: 10.1109/THMS.2021.3098115.
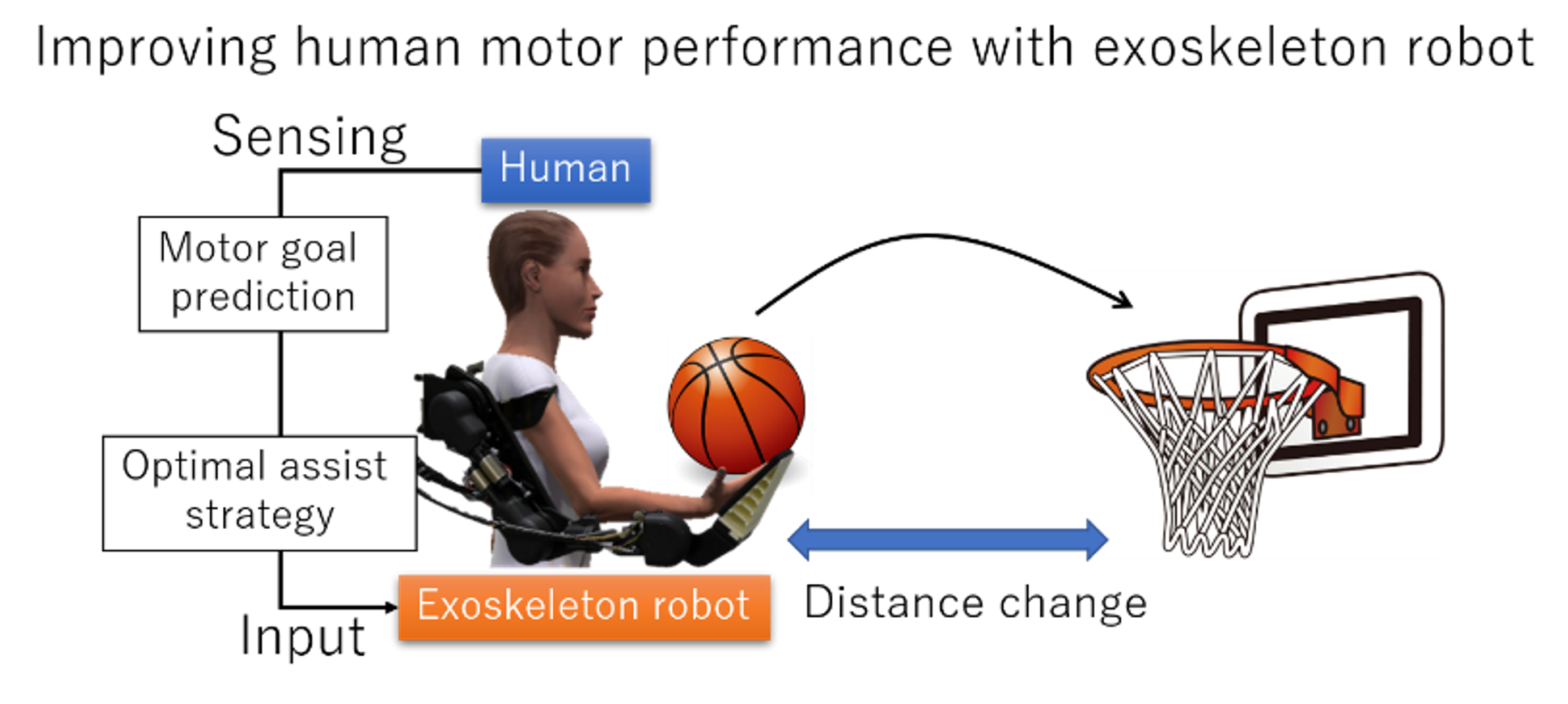
- J. Furukawa, J. Morimoto, “Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User’s Motor Goal”, IEEE Robotics and Automation Letters, vol. 6, No. 2, pp. 1051-1058, 2021
- T. Teramae, T. Matsubara, T. Noda, J. Morimoto, “Quaternion-Based Trajectory Optimization of Human Postures for Inducing Target Muscle Activation Patterns”, IEEE Robotics and Automation Letters, Vol. 5, No. 4, pp. 6607-6614, 2020. (Joint Research with ATR)
Selected Publications
-
Shinya Chiyohara, Jun-ichiro Furukawa, Tomoyuki Noda, Jun Morimoto, Hiroshi Imamizu.:
"Proprioceptive short-term memory in passive motor learning",
Scientific Reports, 13, Article number; 20826, 2023(ATRとの共同研究) -
Asuka Takai, Tatsuya Teramae, Tomoyuki Noda, Koji Ishihara, Jun-ichiro Furukawa, Hiroaki Fujimoto, Megumi Hatakenaka, Nobukazu Fujita, Akihiro Jino, Yuichi Hiramatsu, Ichiro Miyai, Jun Morimoto.:
"Development of split-force-controlled body weight support (SF-BWS) robot for gait rehabilitation",
Frontiers in Human Neuroscience. 17:1197380, 2023(ATRとの共同研究) -
Jun-ichiro Furukawa, Shotaro Okajima, Qi An, Yuichi Nakamura, Jun Morimoto.:
"Selective Assist Strategy by Using Lightweight Carbon Frame Exoskeleton Robot"
IEEE Robotics and Automation Letters, Vol. 7, no. 2, pp. 3890-3897, 2022 -
Jun-ichiro Furukawa, Shinya Chiyohara, Tatsuya Teramae, Asuka Takai, Jun Morimoto.:
"A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control"
IEEE Transactions on Human-Machine Systems, Vol. 51, no. 5, pp. 514-523, 2021 -
Jun-ichiro Furukawa, Jun Morimoto.:
"Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User's Motor Goal"
IEEE Robotics and Automation Letters, Vol. 6, no. 2, pp. 1051-1058, 2021 -
Tatsuya Teramae, Takamitsu Matsubara, Tomoyuki Noda, Jun Morimoto.:
"Quaternion-Based Trajectory Optimization of Human Postures for Inducing Target Muscle Activation Patterns"
IEEE Robotics and Automation Letters, Vol. 5, Issue: 4, pp. 6607-6614, 2020 -
Shinya Chiyohara, Jun-ichiro Furukawa, Tomoyuki Noda, Jun Morimoto and Hiroshi Imamizu.:
"Passive Training with Upper Extremity Exoskeleton Robot Affects Proprioceptive Acuity and Performance of Motor Learning"
Scientific Reports, 10, Article number; 11820, 2020 -
Masashi Hamaya, Takamitsu Matsubara, Tatsuya Teramae, Tomoyuki Noda, and Jun Morimoto.:
"Design of Physical User-Robot Interactions for Model Identification of Soft Actuators on Exoskeleton Robots"
International Journal of Robotics Research, first published online: June 6, 2019 -
Barkan Ugurlu, Paolo Formi, Corinne Doppmann, Emre Sariyildiz, and Jun Morimoto.:
"Stable Control of Force, Position, and Stiffness for Robot Joints Powered via Pneumatic Muscles"
IEEE Transactions on Industrial Informatics, Vol. 15, Issue 12, pp. 6270-6279 -
Tadej Petric, Luka Peternel, Jun Morimoto, and Jan Babic.:
"Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability
Frontiers in Neurorobotics, fnbot.2019.00030, 2019 -
Tatsuya Teramae, Koji Ishihara, Jan Babic, Jun Morimoto, and Erhan Oztop.:
"Human-in-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots"
Frontiers in Neurorobotics, fnbot.2018.00071 -
Tatsuya Teramae, Tomoyuki Noda, and Jun Morimoto.:
"EMG-Based Model Predictive Control for Physical Human-Robot Interaction: Application for Assist-As-Needed Control"
IEEE Robotics and Automation Letters, Vol. 3, issue 1, pp.210-217, 2018 -
Masashi Hamaya, Takamitsu Matsubara, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"Learning assistive strategies for exoskeleton robots from user-robot physical interaction"
Pattern Recognition Letters, Vol. 99, pp. 67-76, 2017 -
Jun-ichiro Furukawa, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"Human movement modeling to detect bio-signal sensor failures for myoelectric assistive robot control"
IEEE Transactions on Robotics, Vol. 33, Issue 4, pp. 846-857, 2017 -
Jun-ichiro Furukawa, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"An EMG-Driven Weight Support System with Pneumatic Artificial Muscles"
IEEE Systems Journal, Vol. 10, No. 3, pp. 1026-1034, 2016
Links
Man-Machine Collaboration Research Team(RIKEN)
Contact Information
takashi.minato [at] riken.jp