Interactive Robot
Research Team
Research Summary
This team aims at developing a social robot that can naturally interact with humans and provide casual and modest support for human daily activities. We explore a mechanism underlies natural interaction and robot behaviors that subconsciously change human behaviors.
- Main Research Fields
- Human-Robot Interaction
- Keywords
-
- Humanoid
- Android robot
- Humanlike expression
- Natural interaction
- Non-verbal interaction
- Multimodal recognition and expression
- Research theme
-
- Modeling human behaviors in interaction and generating natural robot behavior
- Recognizing a state of human activity based on multimodal information
- Design of robot behaviors to lead humans’ subconscious behavioral change
Takashi Minato

History
- 2001
- Japan Science and Technology Agency (JST)
- 2002
- Osaka University
- 2006
- Japan Science and Technology Agency (JST)
- 2011
- Advanced Telecommunications Research Institute International (ATR)
- 2020
- RIKEN
Award
- 2016
- ATR Prize for excellent study
- 2020
- ATR Prize for excellent study
Members
- Carlos Toshinori Ishi
- Senior Scientist
- Kurima Sakai
- Research Scientist
- Takahisa Uchida
- Research Scientist
- Bowen Wu
- Special Postdoctoral Researcher
- Ayaka Fujii
- Postdoctoral Researcher
- Tomo Funayama
- Technical Staff I
- Yuka Nakayama
- Technical Staff I
- Takayuki Kanda
- Visiting Scientist
- Takamasa Iio
- Visiting Scientist
- Chaoran Liu
- Visiting Scientist
- Jiaqi Shi
- Visiting Scientist
- Taiken Shintani
- Visiting Scientist
- Zihan Lin
- Research Part-time Worker I and Student Trainee
- Shudai Deguchi
- Research Part-time Worker I and Student Trainee
- Naomi Uratani
- Administrative Part-time Worker I
- Taiki Yano
- Research Part-time Worker II and Student Trainee
- Haruto Ueno
- Research Part-time Worker II and Student Trainee
- Nabeela Khanum Khan
- Student Trainee
Former member
- Ryusuke Mikata
- Technical Staff I(2022/08-2023/07)
- Changzeng Fu
- Visiting Scientist(2022/5-2023/3)
- Alexander Diel
- Visiting Researcher(2022/07-2023/05)
- Houjian Guo
- Research Part-time Worker II and Student Trainee(2022/8-2024/3)
- Niina Okuda
- Research Part-time Worker II and Student Trainee(2023/06-2025/03)
- Rin Takahira
- Research Part-time Worker II and Student Trainee(2024/05-2025/03)
- Atsushi Toyoda
- Research Part-time Worker II and Student Trainee(2024/09-2025/03)
- Namika Taya
- Administrative Part-time Worker II and Student Trainee(2022/12-2024/3)
- Taichi Matsuoka
- Administrative Part-time Worker II and Student Trainee(2023/6-2024/3)
- Mayuka Yamasaki
- Administrative Part-time Worker II and Student Trainee(2023/06-2025/03)
- Minjeong Bae
- Administrative Part-time Worker II and Student Trainee(2023/06-2025/03)
- Yuki Hori
- Student Trainee (2020/08-2022/03)
- Simon Andreas Piorecki
- Student Trainee(2023/12-2024/08)
- Teruya Inoue
- Student Trainee(2024/06-2025/03)
- Kakeru Sakuma
- Research Intern(2023/9)
Research results
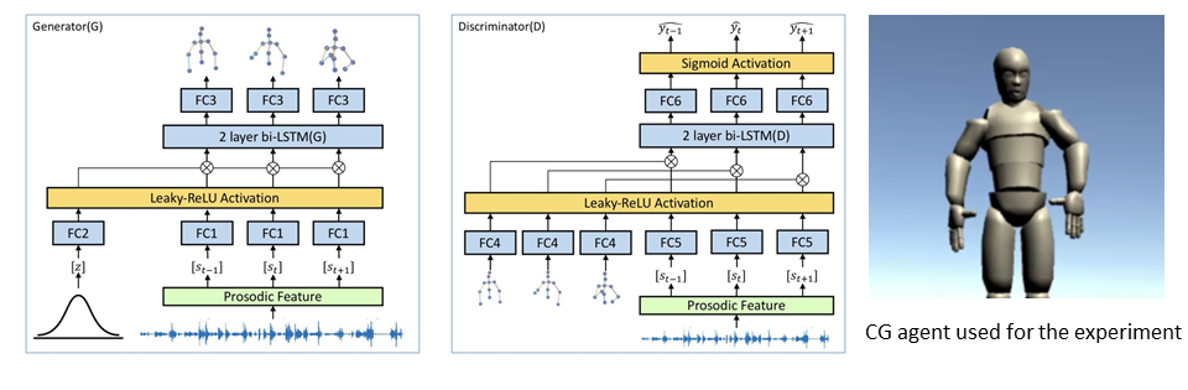
Upper body gestures
For the generation of natural robot movements in interaction, we are studying the generation of upper body gestures synchronized with the robot's voice. The Conditional GAN (Generative Adversarial Networks) model is trained based on the data of natural human gestures while speaking. This model can generate the body/hand gestures from the input speech signals. So far, we have implemented the model in a CG agent, and have shown that human-like gestures are generated through subject experiments.
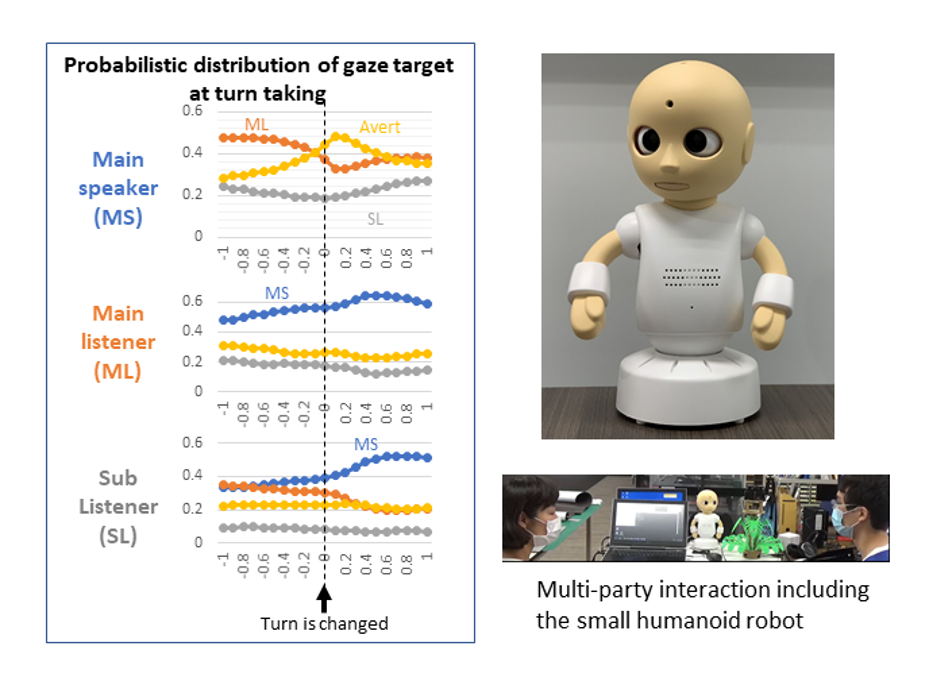
Gaze control
We are studying gaze control in face-to-face interactions between robots and multiple people to generate natural robot motions. Based on the data from multi-person dialogues, we modeled occurrence probabilities of eye contact, looking away, and the direction of looking away depending on the role of the dialogue (speaker, main listener, sub-listener, etc.), and developed a gaze behavior model. We implemented this model to control the gaze of a small robot, and through subjective experiments, we have shown that the model generates more human-like behavior than conventional methods.
Selected Publications
-
Taiken Shintani, Carlos T. Ishi, and Hiroshi Ishiguro
Gaze modeling in multi-party dialogues and extraversion expression through gaze aversion control
Advanced Robotics, Vol.38, Issue 19-20 (2024) -
Ird Ali Durrani, Chaoran Liu, Carlos T. Ishi, and Hiroshi Ishiguro
Is it possible to recognize a speaker without listening? Unraveling conversation dynamics in multi-party interactions using continuous eye gaze
IEEE Robotics and Automation Letters, Vol.9, Issue 11, pp.9923-9929 (2024) -
Kazuki Sakai, Koh Mitsuda, Yuichiro Yoshikawa, Ryuichiro Higashinaka, Takashi Minato, and Hiroshi Ishiguro
Effects of demonstrating consensus between robots to change user's opinion
International Journal of Social Robotics (2024) -
Takahisa Uchida, Takashi Minato, and Hiroshi Ishiguro
Opinion Attribution Improves Motivation to Exchange Subjective Opinions with Humanoid Robots
Frontiers in Robotics and AI, Vol.11, No.1175879 (2024) -
Alexander Diel, Wataru Sato, Chun-Ting Hsu, and Takashi Minato
Asynchrony enhances uncanniness in human, android, and virtual dynamic facial expressions
BMC Research Notes, Vol.16, No.368 (2023) -
Tian Ye, Takashi Minato, Kurima Sakai, Hidenobu Sumioka, Antonia Hamilton, and Hiroshi Ishiguro
Human-like interactions prompt people to take a robot's perspective
Frontiers in Psychology, Vol.14, No.1190620 (2023) -
Alexander Diel, Wataru Sato, Chun-Ting Hsu, and Takashi Minato
Differences in configural processing for human versus android dynamic facial expressions, Scientific Reports, Vol.13, No. 16952, 2023. -
Bowen Wu, Chaoran Liu, Carlos T. Ishi, Jiaqi Shi, and Hiroshi Ishiguro
Extrovert or introvert? GAN-based humanoid upper-body gesture generation for different impressions
International Journal of Social Robotics (2023) -
Alexander Diel, Wataru Sato, Chun-Ting Hsu, and Takashi Minato
The inversion effect on the cubic humanness-uncanniness relation in humanlike agents
Frontiers in Psychology, Vol.14, No.1222279, (2023) -
Carlos T. Ishi, Chaoran Liu, and Takashi Minato
An attention-based sound selective hearing support system: evaluation by subjects with age-related hearing loss
Proc. of IEEE/SICE International Symposium on System Integrations, 2023. -
Xinyue Li, Carlos T. Ishi, and Ryoko Hayashi
Prosodic and voice quality analyses of filled pauses in Japanese spontaneous conversation by Chinese learners and Japanese native speakers
Proc. of International Conference on Speech Prosody, 2022. -
Dongsheng Yang, Qianying Liu, Takashi Minato, Shushi Namba, and Shin'ya Nishida
Optimizing facial expressions of an android robot effectively: a Bayesian optimization approach
Proc. of IEEE-RAS International Conference on Humanoid Robots, 2022. -
Takashi Minato, Kurima Sakai, Takahisa Uchida, and Hiroshi Ishiguro
A study of interactive robot architecture through the practical implementation of conversational android
Frontiers in Robotics and AI, Vol.9, No.905030, 2022. -
Changzeng Fu, Chaoran Liu, Carlos T. Ishi, and Hiroshi Ishiguro
C-CycleTransGAN: A non-parallel controllable cross-gender voice conversion model with CycleGAN and Transformer
Proc. of Asia Pacific Signal and Information Processing Association Annual Summit and Conference, 2022. -
Taiken Shintani, Carlos T. Ishi, and Hiroshi Ishiguro
Expression of personality by gaze movements of an android robot in multi-party dialogues
Proc. of IEEE International Conference on Robot and Human Interactive Communication, 2022. -
Changzeng Fu, Chaoran Liu, Carlos T. Ishi, and Hiroshi Ishiguro
An adversarial training based speech emotion classifier with isolated Gaussian regularization
IEEE Transactions on Affective Computing, Vol.14, No.8, 2022. -
Bowen Wu, Jiaqi Shi, Chaoran Liu, Carlos T. Ishi, and Hiroshi Ishiguro
Controlling the impression of robots via GAN-based gesture generation
Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022. -
Wataru Sato, Shushi Namba, Dongsheng Yang, Shin'ya Nishida, Carlos T. Ishi, and Takashi Minato
An android for emotional interaction: Spatiotemporal validation of its facial expressions
Frontiers in Psychology, Vol.12, 2022. -
Jiaqi Shi, Chaoran Liu, Carlos T. Ishi, and Hiroshi Ishiguro
3D skeletal movement-enhanced emotion recognition networks
APSIPA Transactions on Signal and Information Processing, Vol.10, No.E12, 2021.
Links
Interactive Robot Research Team(RIKEN)
Contact Information
takashi.minato [at] riken.jp