人間機械協調研究チーム
研究概要
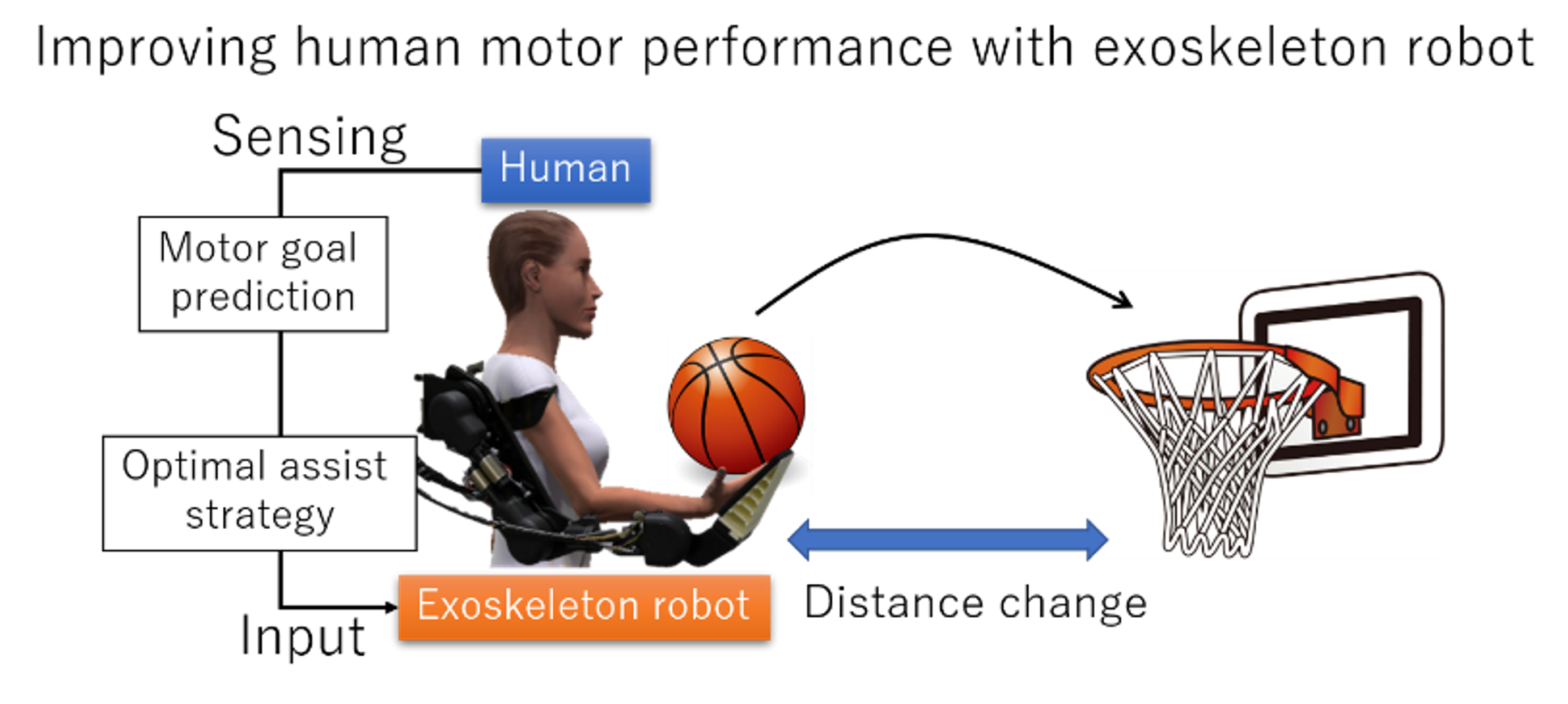
人間の運動意図を察知してさりげなくサポートするアシストロボットを開発することで、主体感を損なわず、人間の能力を最大限に生かす人間と機械の協調の原理を解明し、この原理をロボットへ実装することにより実証することを目指しています。
- 研究分野
-
- アシストロボット
- キーワード
-
- 外骨格型ロボット
- 運動制御
- 動作推定・予測
- 機械学習
- 生体信号解析
- 研究テーマ
-
- 個人に合わせた適応的な動作支援システムの開発
- さりげない運動アシストを実現するリアルタイム動作予測
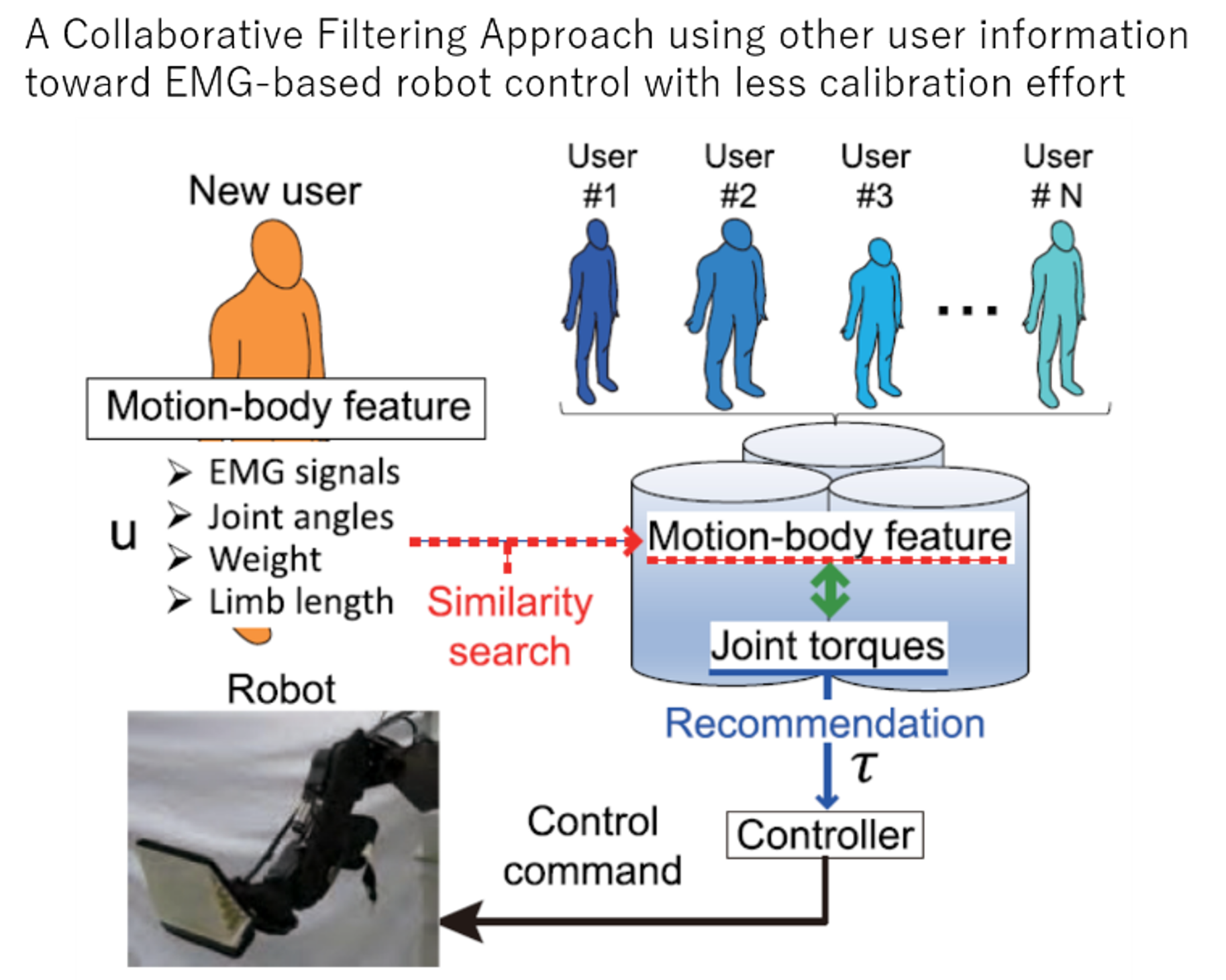
- 生体信号に基づくヒトの動作推定
港 隆史

略歴
- 2001年
- 科学技術振興事業団
- 2002年
- 大阪大学
- 2006年
- 科学技術振興機構
- 2011年
- 国際電気通信基礎技術研究所
- 2020年
- 理化学研究所
受賞歴
- 2016年
- 国際電気通信基礎技術研究所 研究開発表彰 優秀研究賞
- 2020年
- 国際電気通信基礎技術研究所 研究開発表彰 優秀研究賞
メンバー
- 森本 淳
- 客員主管研究員
- 中村 裕一
- 客員研究員
- 古川 淳一朗
- 客員研究員
- 井藤 隆秀
- 特別技術員
- 稲野 明英
- 上級テクニカルスタッフ
- Kai Ren
- 研修生
- Yuanda Yang
- 研修生
過去のメンバー
- 赤尾 幸輝
- 研究パートタイマーII(2025/02-2025/05)
- 山下 航輝
- 研究パートタイマーII(2025/02-2025/05)
- Ilham Julian
- 研修生 (2022/01-2022/03)
- Antonella Rech
- 研修生(2024/06-2024/10)
- Nag Aneek
- インターン (2022/08-2022/09)
- Elena Basei
- インターン(2022/10-2022/12 2023/7-2023/09)
研究成果
- J. Furukawa, S. Okajima, Q. An, Y. Nakamura and J. Morimoto, "Selective Assist Strategy by Using Lightweight Carbon Frame Exoskeleton Robot," in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3890-3897, April 2022, doi: 10.1109/LRA.2022.3148799.
- J. Furukawa, S. Chiyohara, T. Teramae, A. Takai and J. Morimoto, “A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control,” in IEEE Transactions on Human-Machine Systems, vol. 51, no. 5, pp. 514-523, Oct. 2021, doi: 10.1109/THMS.2021.3098115.
- J. Furukawa, J. Morimoto, “Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User’s Motor Goal”, IEEE Robotics and Automation Letters, vol. 6, No. 2, pp. 1051-1058, 2021
- T. Teramae, T. Matsubara, T. Noda, J. Morimoto, “Quaternion-Based Trajectory Optimization of Human Postures for Inducing Target Muscle Activation Patterns”, IEEE Robotics and Automation Letters, Vol. 5, No. 4, pp. 6607-6614, 2020. (ATRとの共同研究)
主要論文
-
Shinya Chiyohara, Jun-ichiro Furukawa, Tomoyuki Noda, Jun Morimoto, Hiroshi Imamizu.:
"Proprioceptive short-term memory in passive motor learning",
Scientific Reports, 13, Article number; 20826, 2023(ATRとの共同研究) -
Asuka Takai, Tatsuya Teramae, Tomoyuki Noda, Koji Ishihara, Jun-ichiro Furukawa, Hiroaki Fujimoto, Megumi Hatakenaka, Nobukazu Fujita, Akihiro Jino, Yuichi Hiramatsu, Ichiro Miyai, Jun Morimoto.:
"Development of split-force-controlled body weight support (SF-BWS) robot for gait rehabilitation",
Frontiers in Human Neuroscience. 17:1197380, 2023(ATRとの共同研究) -
Jun-ichiro Furukawa, Shotaro Okajima, Qi An, Yuichi Nakamura, Jun Morimoto.:
"Selective Assist Strategy by Using Lightweight Carbon Frame Exoskeleton Robot"
IEEE Robotics and Automation Letters, Vol. 7, no. 2, pp. 3890-3897, 2022 -
Jun-ichiro Furukawa, Shinya Chiyohara, Tatsuya Teramae, Asuka Takai, Jun Morimoto.:
"A Collaborative Filtering Approach Toward Plug-and-Play Myoelectric Robot Control"
IEEE Transactions on Human-Machine Systems, Vol. 51, no. 5, pp. 514-523, 2021 -
Jun-ichiro Furukawa, Jun Morimoto.:
"Composing an Assistive Control Strategy Based on Linear Bellman Combination From Estimated User's Motor Goal"
IEEE Robotics and Automation Letters, Vol. 6, no. 2, pp. 1051-1058, 2021 -
Tatsuya Teramae, Takamitsu Matsubara, Tomoyuki Noda, Jun Morimoto.:
"Quaternion-Based Trajectory Optimization of Human Postures for Inducing Target Muscle Activation Patterns"
IEEE Robotics and Automation Letters, Vol. 5, Issue: 4, pp. 6607-6614, 2020 -
Shinya Chiyohara, Jun-ichiro Furukawa, Tomoyuki Noda, Jun Morimoto and Hiroshi Imamizu.:
"Passive Training with Upper Extremity Exoskeleton Robot Affects Proprioceptive Acuity and Performance of Motor Learning"
Scientific Reports, 10, Article number; 11820, 2020 -
Masashi Hamaya, Takamitsu Matsubara, Tatsuya Teramae, Tomoyuki Noda, and Jun Morimoto.:
"Design of Physical User-Robot Interactions for Model Identification of Soft Actuators on Exoskeleton Robots"
International Journal of Robotics Research, first published online: June 6, 2019 -
Barkan Ugurlu, Paolo Formi, Corinne Doppmann, Emre Sariyildiz, and Jun Morimoto.:
"Stable Control of Force, Position, and Stiffness for Robot Joints Powered via Pneumatic Muscles"
IEEE Transactions on Industrial Informatics, Vol. 15, Issue 12, pp. 6270-6279 -
Tadej Petric, Luka Peternel, Jun Morimoto, and Jan Babic.:
"Assistive Arm-Exoskeleton Control Based on Human Muscular Manipulability
Frontiers in Neurorobotics, fnbot.2019.00030, 2019 -
Tatsuya Teramae, Koji Ishihara, Jan Babic, Jun Morimoto, and Erhan Oztop.:
"Human-in-The-Loop Control and Task Learning for Pneumatically Actuated Muscle Based Robots"
Frontiers in Neurorobotics, fnbot.2018.00071 -
Tatsuya Teramae, Tomoyuki Noda, and Jun Morimoto.:
"EMG-Based Model Predictive Control for Physical Human-Robot Interaction: Application for Assist-As-Needed Control"
IEEE Robotics and Automation Letters, Vol. 3, issue 1, pp.210-217, 2018 -
Masashi Hamaya, Takamitsu Matsubara, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"Learning assistive strategies for exoskeleton robots from user-robot physical interaction"
Pattern Recognition Letters, Vol. 99, pp. 67-76, 2017 -
Jun-ichiro Furukawa, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"Human movement modeling to detect bio-signal sensor failures for myoelectric assistive robot control"
IEEE Transactions on Robotics, Vol. 33, Issue 4, pp. 846-857, 2017 -
Jun-ichiro Furukawa, Tomoyuki Noda, Tatsuya Teramae, and Jun Morimoto.:
"An EMG-Driven Weight Support System with Pneumatic Artificial Muscles"
IEEE Systems Journal, Vol. 10, No. 3, pp. 1026-1034, 2016
関連リンク
お問い合わせ先
takashi.minato [at] riken.jp
※[at]は@に置き換えてください。